عروس دریایی موجود شگفت انگیزی است. بدن آنها از ۹۹ درصد آب تشکیل شده است. عروس دریایی در طول میلیونها سال به شرایط مختلف و محیطهای متنوع در آب شور و یا آب شیرین سازگار شدهاند. ربات عروس دریایی Aqua jellies براساس الگوی بیولوژیکی این جاندار ساخته شده است. ربات عروس دریایی Aquajellies دارای طراحی بیودیزاین BioDesign است. همانطور که در پستهای پیشین اشاره شد طراحی و الگو برداری از جانداران و موجودات زنده را بیودیزان میگویند. ربات عروس دریایی Aquajellies به عنوان نزدیکترین طراحی به مدل طبیعی خود است. تکنولوژی ارتباطی یکپارچه و سنسورهای به کار رفته و همچنین تشخیص زمان واقعی در این ربات عملکردی هماهنگ را به وجود میآورد. در ادامه تحلیل این ربات با بحش روبو-پدیا وب سایت دیجی اسپارک همراه باشید.
معرفی ربات عروس دریایی Aquajellies
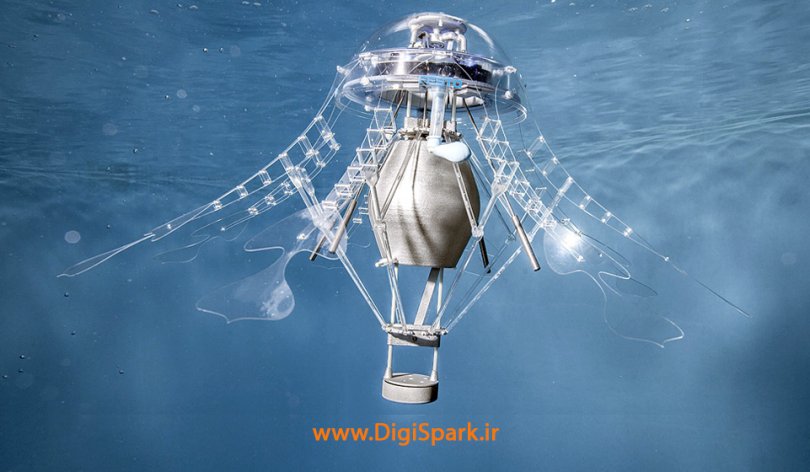
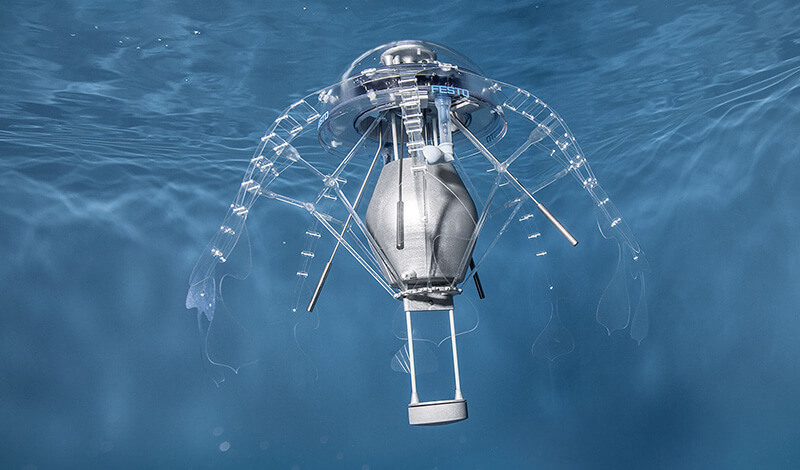
ربات عروس دریایی Aquajellies به عنوان بخشی از شبکه آموزشی Bionic است. دانشگاههای معتبر، موسسات و شرکتهای توسعه Festo به انتقال اصول اساسی طبیعی به دنیای فنی اتوماسیون مشغول هستند. ساخت و توسعه ربات عروس دریایی Aquajellies تلاش برای نزدیک شدن به عروسهای دریایی شگفت انگیز و یادگیری از آنهاست. کمپانی Festo ربات Aquajellies را برای اولین بار در نمایشگاه هانوفر در سال ۲۰۰۸ ارائه کرد. از آن به بعد این گروه تحقیقات خود را گسترش دادند. ضمن بهبود تکنولوژی آن از فناوری اطلاعات هم بهره بردند. در ربات عروس دریایی Aquajellies برای نظارت، کنترل و دریافت اطلاعات از تلفنهای هوشمند استفاده شد. با استفاده از برنامه و اپلیکیشن در گوشیهای هوشمند میتوان وضعیت فعلی Aquajellies را ضبط و ردیابی کرد. میتوان پارامترهای دیگری چون: وضعیت باتری، درجه حرارت، میزان مصرف برق و عمق و شدت جریان آب را هم ملاحظه کرد. Festo یا استفاده از تکنولوژی و علم بیونیک به دنبال سیستمهای کارآمد برای فناوری آب در آینده است. ربات عروس دریایی Aquajellies از متریال سبک وزن ساخته شده است و دارای یک بدن مرکزی و هشت شاخک شفاف برای حرکت است. این ربات دریایی دارای یک کنترل حلقهای مادون قرمز، سنسور فشار و سنسورهای رادیویی است. یک پردازنده به صورت دائم وضعیت سیستم درایو را نظارت میکند، Aqua jellies دارای یک درایو الکتریکی، دو باتری لیتیوم یون و سرو موتور Servo Motor است.
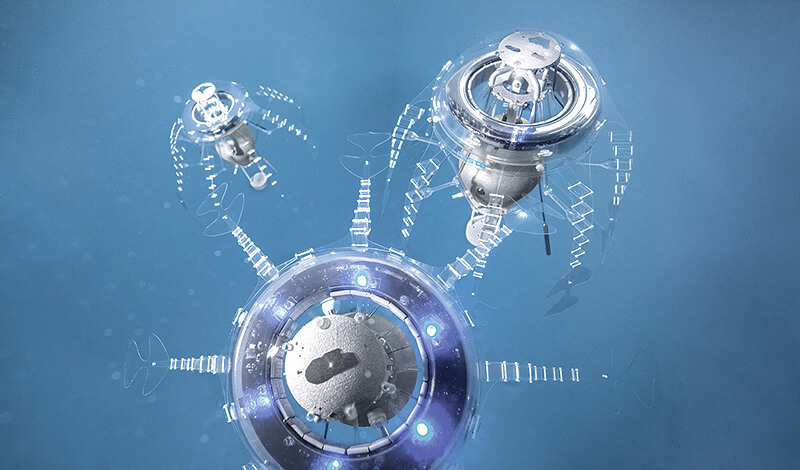
موتور الکتریکی مرکزی دو صفحه درایو را در قسمت بالا و پایین بدن تحت فشار قرار میدهد. از مفاصل رمبو شکل استفاده میکند تا هشت شاخک را حرکت دهد. شاخکها با ساختار Fin Ray ساخته شدهاند. ساختار Fin Ray با توجه به عملکرد باله ماهی ساخته شده است. این ساختار به طور خودکار شامل کشش متناوب و فشار جانبی متصل به دنده است. اگر یک طرف تحت فشار قرار گیرد، ساختار هندسی به صورت خودکار در جهت مقابل نیرو اعمال میکند. همانطور که گفته شد ربات عروس دریایی Aquajellies دارای هشت شاخک است که با خمش این شاخکها همانند الگوی بیولوژیکی خود حرکت میکند. حرکت آنها در فضای سه بعدی با جابهجایی وزن کنترل میشود. این صفحه دارای یک آونگ است که به جابهجایی این ربات در چهار جهت فضا کمک میکند. وقتی که آونگ در یک جهت خاص حرکت کند مرکز جاذبه جرمی جابهجا میشود. سپس ربات در همان جهت شنا میکند. بنابراین ربات عروس دریایی Aquajellies همراه با نیروی محرکه میتواند در هر جهت فضایی شنا کند. ربات عروس دریایی دارای سه سنسور هوشمند: فشار، رادیویی و حسگر مادون قرمز است. سنسور ارتباطی اصلی حسگر مادون قرمز است که به یک حلقه در گنبد خود متصل است. ۶ چراغ سفید و ۶ LED آبی در صفحه مدار به کاربر اجازه میدهد ارتباطات را در عمل ببیند، اجتناب از برخورد با اجسام دیگر با استفاده از پالس سیگنالهای مادون قرمز صورت میگیرد.
ربات عروس دریایی Aquajellies برای برقراری ارتباط با کاربر از سیستم رادیویی کوتاه ZigBee استفاده میکند. این سیستم منجر به صرفه جویی در انرژی خواهد شد. اطلاعات در زمان واقعی از طریق یک کامپیوتر بیرونی انتقال مییابد، وضعیت و دادههای اطلاعاتی توسط WLAN به برنامه مرتبط با Android مبادله میشود. در ربات عروس دریایی Aquajellies علاوه بر سنسورهایی که محیط اطراف خود را نظارت میکنند، دارای سیستم نظارت بر وضعیت و انرژی خودش میباشد. یک سوئیچ الکترومغناطیسی جهت گرایش نیروی دریا را ثبت میکند. سنسور فشار ربات را در تعیین موقعیت خود و فشار فضا را مشخص میکند.
مشخصات فنی ربات عروس دریایی Aquajellies
تعداد قطعه
۱ میکروپروسسور برای ارتباط با نور
۱ میکروپروسسور برای واحد کنترل موتور
۱ میکروپروسسور با ماژول ZigBee برای ارتباطات رادیویی ۳٫۷V . 12c-bus
۱ سنسور فشار
۱ سنسور دما
۱۴ LED مادون قرمز با انتقال قدرت ۲۵۰ مگاوات
۱۱ گیرنده مادون قرمز
۱ کنترل کننده Hot Swap
۲ سرو موتور برای تعیین جهت که توسط میکروپروسسور کنترل میشود
۱ سنسور شتابسنج
۳ سنسور شیب و کجی ۳D
۱ باتری قابل شارژ-لیتیوم یون ۳٫۷V , 3000 MHZ
۱ موتور کورلس ۳ ولت
۱ چرخ دندهها با نسبت انتقال ۱به ۱۸۰
۱ پردازنده اصلی: میکروکنترلر ۲۰ MHz
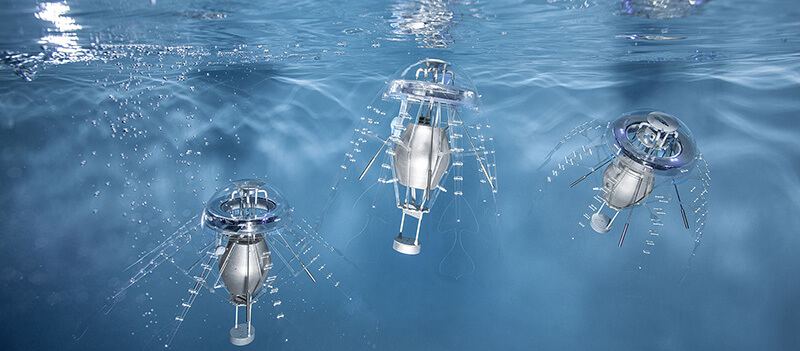
ربات عروس دریایی Aquajellies میتواند الهامبخش پیشرفتهای دیگر باشد. عملکرد و الگوهای رفتاری آن میتواند به صورت چندین سیستم مستقل و غیر متمرکز برای یک هدف خاص در شبکه باشد. ربات Aqua jellies به توسعه دهندگان کمک میکند تا به عنوان فناوری برای اتوماسیون فردا و فراتر از آن عمل کند. اگر اصل ساختارهای اطلاعات موجود در Aqua jellies به سیستم کنترل انتقال یابد. ارتباطی از جمله کالیبرسیون دائمی نظارت وضعیت صورت مییابد که میتوان تا حدی از این ایده در حوزه مدیریت آب بهره برد.
گروه سازنده ربات Aquajellies
دکتر استون مدیر عامل Festo
مدیر پروژه: الیاس ماریا
گروه Festo و …
در پایان نظرات و پیشنهادات خود را با ما درمیان بگذارید و با اشتراک گذاری این آموزش در شبکه های اجتماعی , از وبسایت دیجی اسپارک حمایت کنید.


سلام
بسیار عالی
جذاب ترین بخش معرفی مشخصات فنی بود از توضیحات خوب شما ممنونم.