معرفی ربات NAO در کارگاه عملی و آموزشی دیجی اسپارک
NAO یک ربات انسان نما به ارتفاع ۵۸ سانتی متر- کوچک ، بامزه و گرد- است. NAO به عنوان یک هم خانه جایگزین شده است. قابلیت حرکت، تشخیص انسان، شنیدن و حتی گفتکو با انسان را دارد.
از زمان تولید اولیه – تولد NAO – در سال ۲۰۰۶ تا کنون مرتبا در حال تحول بوده تا جذابتر، پیچیده تر، فهیم ترو دوست داشتنی تر شود. تا در مدت کوتاهی به یک دوست تبدیل شود.
سازنده NAO ، دبران- Aldebran – او را به عنوان یک همدم واقعی ساخت. یک موجود کوچک است و کمک میکند تا شرایط انسان بهتر شود. ساختار انسان نما و کاملا تعاملی ای که دارد او را دوست داشتنی کرده است.
NAO یک شخصیت کوچک است که ترکیب سخت افزاری و نرم افزاری منحصر به فردی دارد. او شامل سنسورها، موتورها و نرم افزار مبتنی بر NAOqi – نرم افزار اختصاصی سیستم عملیاتی -است. خاصیت شگفت انگیز بودن NAO به خاطر برنامه ریزی و جان بخشی اوست.
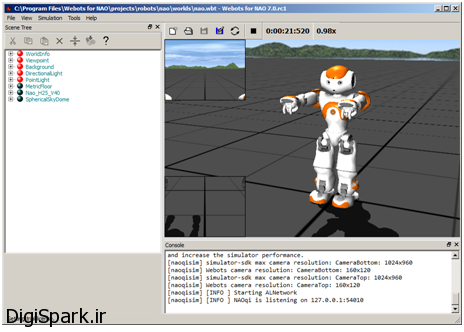
کتابخانه حرکات او درابزارهای شبیه سازی و مانند Choregaphe و سایر نرم افزارهای پیشرفته برنامه ریزی موجود است.
در این نرم افزارها می توان رفتارها را جزیی تر تعریف کرد ویا به داده های سنسورها دسترسی داشت و کنترل ربات را به دست گرفت.
ربات شگفتانگیز NAO
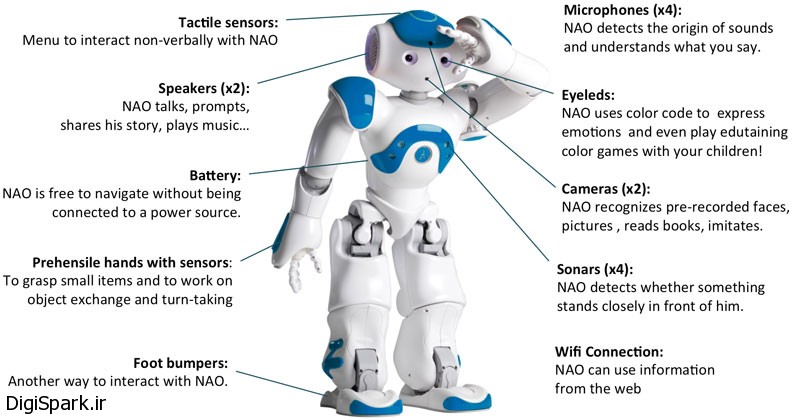
مشخصات NAO :
۲۵ درجه آزادی برای تحرک
شبکه سنسورها شامل :
۲ دوربین برای دیدن اطراف
۹ سنسورهای تماسی برای تشخیص تماس با انسان
فاصله یاب سونار
۴ میکروفون جهت داربرای شنوایی بهتر
دو سنسور IR
یک برد اینرسی
۸ سنسور فشار
ابزارهای ارتباطی مختلف شامل :
سنکرون ساز صدا
LED
۲ اسپیکر
یک cpu واقع در سر ربات با مشخصات Intel ATOM 1.6Ghz که راه اندازهسته لینوکس است و از NAOqi پشتیبانی میکند.
یک cpu هم بدنه.
باتری با توان ۴۸٫۶ وات-ساعت ساخت شرکت NAO با مدت زمان ۱٫۵ ساعت یا بیشتر( بسته به میزان مصرف).
مشخصات ربات NAO
مدل راه رفتن NAO با پیروی از یک مدل ساده دینامیکی است ( پاندول معکوس خطی ) و برنامه پذیری چهارجانبه، تعادل کامل او به جهت این است که از سنسورهای مفاصل همزمان فیدبک گرفته می شود. این روش راه رفتن کاملا تعادلی و مستحکم و بدون لرزش را موجب می شود. و بدنه دربین صفحات پهلویی وروبه جلو در نوسان است . تقریبا روی تمام سطوح قادر به راه رفتن است؛ از قبیل : فرش، سرامیک و چوب.
مدل حرکات بدن NAO بر پایه سینماتیک معکوس تعمیم یافته است. که از دستگاه مختصات دکارتی، کنترل مفصل، تعادل، افزایشی، و اولویت وظیفه است. بنابراین اگر شما از NAO بخواهید که دستش را دراز کند، او کمی زانویش را خم می کند زیرا بازوها و مفاصل پای او در یک محاسبه اند.


سلام. خیلی ممنون از مطلب بسیار خوبتان، میخواستم بدانم که آیا امکاش هست که یک نقشه از ساختار درونی و نرم-سخت افزاری این ربات را در سایتتان بگذارید؟
ممنون میشوم.
با سلام و تشکر از شما
بررسی میکنیم، اگر امکان پذیر باشد اقدام خواهیم کرد.