
ربات چهار پا آراکنا یک پروژه سخت افزاری رباتیک اوپن سورس Open Source میباشد. از اجزاء و قطعات آماده و همچنین تجهیزات پرینت شده توسط ۳D پرینتر ساخته شده است. آراکنا Aracna یک پلتفرم جدید در زمینه رباتهای چهارپا است. نیاز به دستورالعمل از موتورهای غیر شهودی دارد و به همین دلیل یک چالش جالب برای الگوریتمهای یادگیری در زمینه راه رفتن رباتیک است، مانند آنچه که اغلب در محاسبات تکاملی و جوامع زندگی مصنوعی مورد توجه قرار گرفته است. در ادامه این مطلب تحلیلی بر طراحی و روند عملکرد این ربات چهارپا با بخش روبو پدیا Robopedia دیجی اسپارک همراه باشید.
تحلیل از نگاه طراحی صنعتی
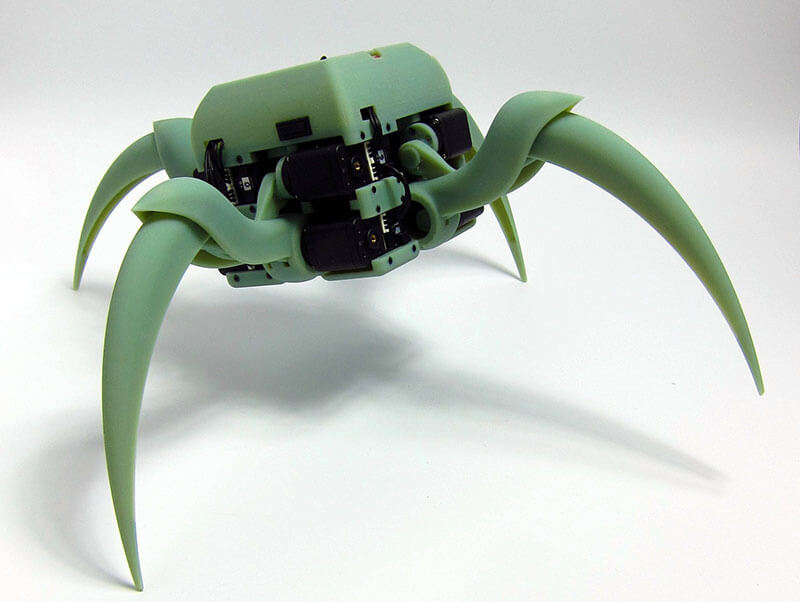
طراحی این ربات را اصطلاحاً بیودیزاین میگویند. بیودیزاین بخشی از طراحی است که طراح برای ابداع طرح از موجودات زنده الهام میگیرد. در نگاه اول شباهت این ربات با عنکبوت کاملاً مشهود است، که دارای یک بدنه نسبتاً کوچک و پاهای کشیده است. در ساختار بدن عنکبوت در جهت حفظ تعادل پاها به صورت قرینه در زیر شکم قرار گرفته و همچنین کشیدگی طول پا از ساق تا زانو بیشتر است، که در طراحی این ربات نیز در جهت حفظ تعادل بیشتر و تحمل وزن بدنه توسط پاها از این ویژگی بهره برده شده، ضخامت پاها متناسب با تحمل وزن در نظر گرفته شده که این توانایی را به ربات میدهد که بتواند سرعت بیشتری را به هنگام راه رفتن داشته باشد. استفاده از ۳D پرینتر برای ساخت این ربات دو نتیجه مثبت به همراه داشته؛ یکی استفاده از متریال کم وزن و سبک بودن ربات، دوم اینکه اشکال پیچیده نیز توسط ۳D پرینتر به راحتی و کاملاً به صورت یکسان بدست میآید و در صورت بروز مشکل برای هر یک از قسمتهای بدن ربات به راحتی میتوان آن را جایگزین کرد. بدنه هسته ربات به شکل مکعب دارای کرو است و طراحی خاصی ندارد.
ربات آراکنا یک طراحی تجدیدی Redesign از طرحهای رباتهای چهارپا پیش از خود است و برای اینکه این ربات کارکرد آموزشی و تحقیقاتی داشته مبحث طراحی آن بسیار ساده است و کمتر به آن پرداخته شده، شاید در آینده نسلهای کاربردی این ربات متناسب با عملکردی که در نظر گرفته شده برای آن دارای طراحی های ویژه و کابردی باشند، اما تا به اینجا آراکنا فقط یک ربات آزمایشگاهی با طراحی بیودیزاین است.
طراحی کلی سختافزار ربات
سختافزار آراکنا بر پایه بهبود ماشینهای آزمایشگاهی رباتیک پیش از خود طراحی شدهاست. (بونگارد ۲۰۰۶-یوسینسکی ۲۰۱۱ و …) در حالی که این ربات از لحاظ کیفی شبیه به این رباتهاست. طراحی آراکنا به صورتی است که دارای تنه و چهارپا است، که هر پا دارای دو مفصل بوده که عملکردی شبیه به زانو دارد و این توانایی را به پا میدهد که به سمت جلو یا عقب بچرخد.

با استفاده از مطالعه رباتهای چهارپا متوجه میشویم که موتورهای این رباتها به سرعت ضعیف شده و از بین میروند و نمیتوانند دستورات ارسالی را درست و به صورت قابل اطمینان اجرا کنند. بروز این مشکل در این دسته از رباتها به علت زیاد بودن وزن آنهاست. این یک واقعیت است که سروو موتورهای استفاده شده بر روی پای این رباتها موجب سنگین وزن شدن آنها میشود. بنابراین به چندین روش مختلف وزن هسته ربات را کاهش دادند. در ابتدا تغییرات اساسی در برد اصلی انجام شد؛ با حذف کامپیوتر لینوکس با وزن ۳۷۰ گرم و جایگزین کردن آن با یک میکروکنترلر Arbotix که وزن آن فقط ۴۷ گرم است، کاهش وزن اولیه صورت گرفت.
کاهش وزن ربات آراکنا
قرار دادن تمام موتور ها در هسته بدن به جای پاها و ارتباط بیسیم با ربات از طریق پروتکل XBee انجام پذیرفت.
روش دومی که برای کاهش وزن ربات استفاده شده، استفاده از یک باتری سبکتر است. ربات های چهارپا پیش از آراکنا دارای دو باتری لیتیوم ۱۲ ولت بوده که وزن هر کدام ۱۴۰ گرم میباشد که در مجموع ۲۸۰ گرم وزن باتریها بوده شکل شماره ۲ یک مدل کد ( CAD ) ارائه شده از آراکناست.

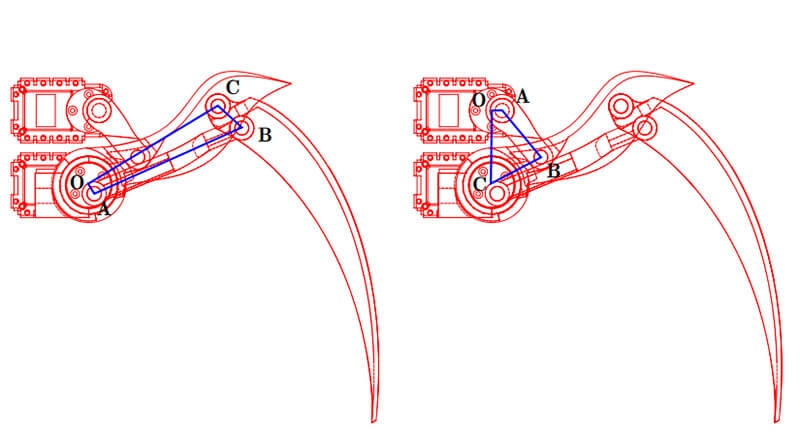
آراکنا دارای یک باتری لیتیوم پلیمری ۱۱٫۱ ولت با وزن ۱۲۲ گرم است. همانند بقیه رباتهای چهارپا آراکنا هم میتواند برای مهار نیرو در صورت نیاز از نیروی باتری اجتناب کند، که این امر ممکن است برای آزمایشهای طولانی مفید واقع شود. اصلاح اصلی در جهت کاهش وزن این ربات در پاها صورت گرفته است، استفاده از دو مکانیزم چهار باند برای مفاصل هر پا بوده، این مکانیزم موجب میشود که مفصل کنترل بیشتری بر حرکات ریز و فعالیت خود داشته باشد و همچنین نسبت قرار گیری هر پا نسبت به موتور قدرت مانور بیشتری را به ربات میدهد.
شکل شماره ۳ سیستم کرنک راکر ( crankroker ) را نشان میدهد، جایی که گیره ورودی توسط یک سروو فعال میشود و منجر به حرکت پاها میگردد. نمونه نهایی آراکنا Aracna به صورت چند قطعه توسط رینتر سه بعدی پرینت شده است. با ۹ قسمت کوچکتر در قسمت بالا، برای کاهش مواد و زمان پرینت، این قطعات را حتی میتوان به صورت جداگانه پرینت کرد؛ مخصوصاً اگر نیاز به قطعه جایگزین احساس شد. بدنه آراکنا دارای ۱۱ قسمت است. در شکل شماره ۴ مجموعهای از ۱۲ قسمت پرینت شده، شامل : ۱۱ قسمت بدنه و یک پا است. این پیکر بندی اجازه میدهد تا موتورهای سروو در هسته ربات قرار بگیرند و منجر به کاهش اینرسی و جرم هر پایه شوند. وزن یک پای آراکنا ۱۰۵ گرم است در حالی که وزن پای ربات چهارپا ساخته شده پیش از آن ۲۱۷ گرم است. آراکنا بر اساس رفع مشکلاتی که در یک پلت فرم قبل از خود در ساخت ربات چهارپا بود طراحی شده، که در طرح قبلی پاها به میزانی سنگین بودند که موتورها نمیتوانستند دستورات ارسالی را بهه درستی اجراکنند. ما این مشکل را با قرار دادن تمام موتور ها در هسته بدن به جای پاها و همچنین طراحی که باعث میشود سروو موتورها مزیت مکانیکی بیشتری از خود نشان دهند بر طرف کردیم.
تغییر نهایی در ربات آراکنا
برای افزایش توانایی ربات قدرت موتورهای سروو را ارتقاء دادند که هرکدام از این تنظیمات توسط الگوریتمهای یادگیری مشخص شدهاست. به طور ویژه موتور Dynamixel AX12 به موتور AX 18A ارتقاء داده شد که دارای گشتاور و دوران بالاتریاست ( ۱٫۸ NM در برابر ۱٫۵ NM ) و همچنین دارای جریان اختصاصی بالاتر ( ۲٫۲ A در برابر ۱٫۵ A ) ور در آخر سرعت پاسخگویی بیشتر ۹۷ در برابر ۵۹ دور در دقیقه بدست آمد.
کاربران دیجی اسپارک، لطفا در خصوص این ربات و شیوه عملکرد آن نظراتتان را از طریق فرم انتهای این پست با دیگر کاربران به اشتراک بگذارید.