
اکتشاف در عمق اقیانوس نیاز به مهارت و تخصص و هوش انسانی دارد. با این وجود غواصان توانایی رفتن به عمق بیش از ۵۰ متر را ندارند و بدن انسان تحمل عمق بیش از این را ندارد. حضور انسان در عمق آب نیاز به تبحر و همچنین محافظت و تجهیزات زیادی دارد. با این وجود نمیتوانند زمان زیادی را زیر آب بگذرانند. در مقابل رباتهای دریایی میتوانند به راحتی به بخشهای عمیق اقیانوس دسترسی پیدا کنند و همچنین زمان زیادی را زیر آب بگذرانند، اما تواناییهای این رباتها در اعماق زیاد محدود میباشد و نیازمند اپراتورهای ماهر جهت هدایت هستند.
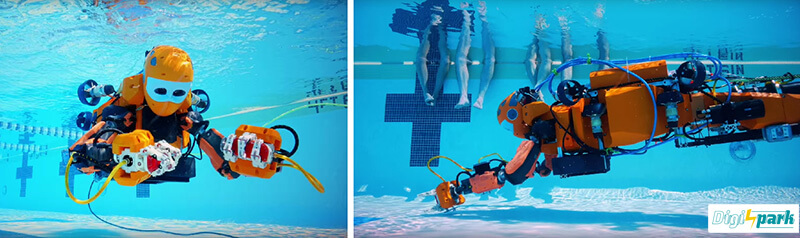
Ocean one یک ربات زیردریایی انسان نما برای زیر آب است. این ربات دارای قابلیت بازخورد لمسی است که توسط اپراتور انسانی هدایت میشود. این قابلیت را ایجاد میکند که انسان عمق اقیانوسها را کشف کند. وعده کشف اقیانوسها عاملی است که کاشفان و دانشمندان علم رباتیک را به خود جذب میکند. چه از نظر مطالعه محیط زیست زیر آب و چه از نظر بررسی تغییرات آب و هوایی و یا به امید کشف منابع طبیعی، موجودات ناشناخته و یا حتی اسرار تاریخی که در کف دریاها و اقیانوسها دفن شدهاند.
اهداف ربات Ocean One
هدف از ساخت این ربات و همچنین این پروژه جستجوی اعماق دریاها و اقیانوسها در محیطهای خطرناک و غیر متعارف است، همچنین نگهداری از تجهیزات زیر آبی و پشتیبانی از راه دور آنها، ساخت زیر ساخت برای نظارت بر محیط زیست و انجام عملیات پیشگیری و ریکاوری در صورت لزوم است.
بخش فنی ربات Ocean One
Ocean one دارای یک جفت بازوی قابل کنترل است. با گشتاور بالا که از طراحی بازوی ربات MEKA استفاده شده است. بازوها از لاستیک پوشیده شده که موجب افزایش گشتاور حرکت سازگار، کنترل نیرو و همچنین افزایش ایمنی در صحت انجام کار میشود. هر بازو دارای هفت مفصل و دارای چنگکهایی دست مانند در انتهای هر بازو است. هر دست Ocean one دارای سه انگشت است. قدرت بازوها و دستهای این ربات در طراحی آن به صورتی است که میتواند نمونههای ظریف و حساس را بدون آسیب نگه داری و جمعآوری کند. همچنین به اندازهای قوی است که وسایل و ابزارهای سنگین را نگهدارد.
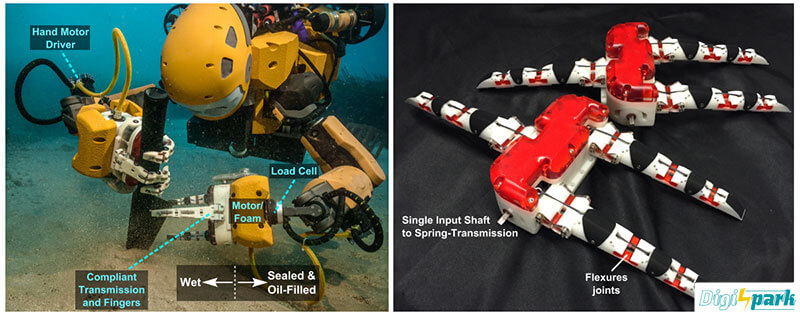
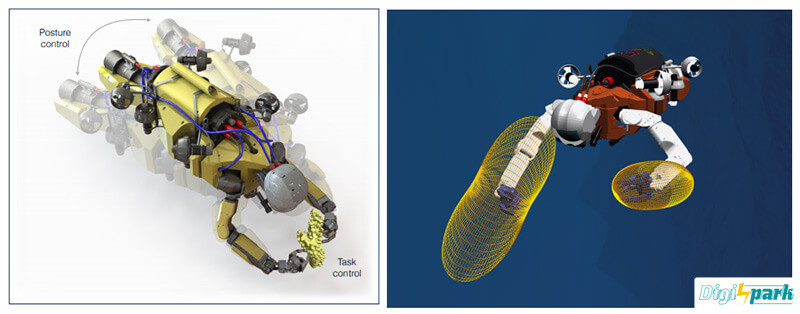
در این ربات به وسیله (O-Ring) حلقههای پویا اصطحکاکی در شفت میزان ضربه و آسیب را کاهش دادند. برای سبک شدن وزن کلی ربات، وزن دستهای ربات را کاهش دادهاند. به همین دلیل برای هدایت هر سه انگشت یک موتور استفاده شده است. آن موتور در محفظهای مهر و موم حاوی روغن و درون محفظه دیگری قرار گرفته شده است. توسط یک موتور تک شفت که تاندونهای انگشتان را تحت کنترل دارد. سر این ربات محل قرار گیری دوربین برای دید پیرامون اپراتور است. وظیفه انتقال دادهها به اپراتور را بر عهده دارد. جالب است بدانید که برای هدایت ربات Ocean One به هشت اپراتور نیاز است.
بخش طراحی ربات Ocean One
در نگاه اول به ربات Ocean One متوجه شباهت غیر قابل انکار آن با انسان میشویم. همانطور که در پست معرفی و تحلیل عملکرد ربات چهارپا آراکنا Aracna Quadruped Robot اشاره کردم، به طراحی که بر مبنای واقعیت موجودات زنده صورت میگیرد؛ اصطلاحاً بیودیزاین یا طراحی ارگانیک و یا بیومورفیک میگویند. طراحی بیودیزاین به عنوان نظریهای مخالف طراحی هایتک High tech خلق شده است. زیرا کلونی محصولات هایتک در مغایرت با قوانین طبیعت است. سعی شده در طراحی اکثر رباتها، مانند گذشته با الهام از طبیعت پیش برود. همچنین برای پیروی از آن و ساختار غیر قابل انکار مخلوقات در حرکت، ساختار بدنی، ویژگی، توانایی و … از این سبک طراحی استفاده شود. این امر تا حد زیادی وابسته به عملکرد ربات میباشد.
در جهت شناخت بهتر این ربات و طراحی انتخاب شده برای آن لازم است باری دیگر اهداف ساخت آن را مرور کنیم.
- کشف اعماق اقیانوسها و دریاها
- مطالعه محیط زیست زیر آب
- بررسی تغیرات آب و هوایی
- کشف منابع طبیعی زیر آب
- کشف موجودات ناشناخته
- اسرار تاریخی در عمق آب
- نگهداری از تجهیزات
- و …
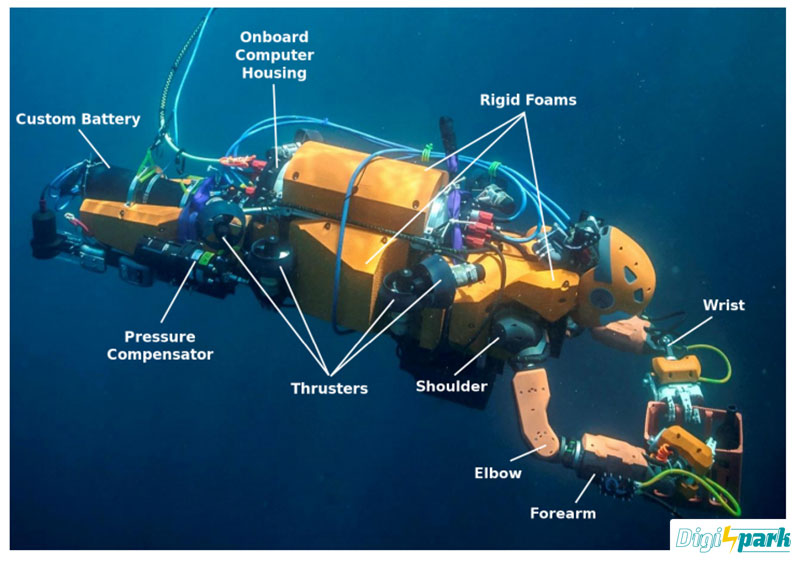
با بررسی اهداف ربات کاوشکر Ocean One میتوان درک بهتری از علت انتخاب این ظاهر برای آن داشته باشیم. بدنه پایینی ربات Ocean one کاملاً شبیه به یک زیر دریایی ساخته شده که حرکت اصلی و حفظ تعادل ربات با آن صورت میگیرد. به علت اینکه ربات Ocean One برای اعماق آب طراحی شده است، در طراحی آن از اشکال کِرودار و منحنی استفاده شده است. اگر به طراحی بدن موجودات دریایی دقت کنید همه داری بدنی گرد و منحنی هستند. این حالت ظاهری برای حرکت آسان در آب به آنها کمک میکند. به صورت کلی خطوط منحنی چه در آب و چه در خشکی میزان اصطحکاک با فضا را کاهش میدهد. همچنین باعث افزایش سرعت حرکت ربات میگردد. بدنه بالایی و هیجان انگیز ربات Ocean One کاملاً شبیه به انسان است. این ربات همانند انسان دارای سر، گردن و بازو و دست و انگشت است.
نکته اصلی در طراحی ربات Ocean One شبیه سازی دست انسان میباشد. علت اصلی شکل قسمتهای دیگر در جهت تکامل بازو ودستهای آن و شبیه سازی آن به انسان است. این ربات به منظور جایگزینی غواصان در شرایط سخت، عمق زیاد و طولانی مدت است. به این منظور باید تواناییهای فیزیکی مد نظر مشابه به انسان را دارا باشد. طراحی بازوها و دستها و سه انگشت ربات Ocean One برای برطرف کردن این نیاز است. تا عملکردی مشابه با بدن انسان داشته و جایگزین مناسبی برای آن باشد. طراحی انگشتها و دست با شبیه سازی دست انسان در جهت خواست عملکرد مشابه است. در این صورت ربات توانایی حمل اجسام مختلف را دارا خواهد بود. برای همین طراحی بازو و دست و حتی تا حدودی انگشتان با توجه به ارگونومی بدن انسان و با علم آنتروپومتری صورت گرفته است.

تیم سازنده Ocean One
ربات Ocean One با مشارکت محققان آزمایشگاه رباتیک استنفورد، گروه علوم کامپیوتر دانشگاه استنفورد، آزمایشگاه بیومیتیک، گروه مهندسی مکانیک دانشگاه، مکا رباتیک دانشگاه علم و صنعت کینگ عبدالله، DRASSM، وزارت فرهنگ، LIRMM، دانشگاه مونتپلیر ساخته شده است. امیداوریم روزی برسد که رباتهای جوانان ایرانی را که در عرصههای بین المللی حضور دارند، در این بستر معرفی کنیم. فراموش نکنید برای توسعه بخش روبو پدیا در دیجی اسپارک، رباتهای مورد نظر را از طریق بخش نظرات انتهای همین پست معرفی کنید. من سارا ضیایی کارشانسی ارشد طراحی صنعتی، سوالات شما در خصوص طراحی و بدنه ربات را پاسخگو خواهم بود.
در پایان نظرات و پیشنهادات خود را با ما درمیان بگذارید و با اشتراک گذاری این آموزش در شبکه های اجتماعی , از وبسایت دیجی اسپارک حمایت کنید.
سلام
توضیحات روان و ساده و قابل فهم
پست های بیشتری با محوریت تکنولوژی و ربات ها منتشر کنید تا به روز باشیم.
سلام
ممنون از نظرتون، تلاش من هم انتشار اطلاعات به روز است امیدوارم از پستهای دیگر هم لذت ببرید.