
رزبری پای پیکو Raspberry Pi PICO یک برد میکروکنترلر بر پایه تراشه RP2040 اما اینبار در یک ظاهر و کارآیی کاملا متفاوت عرضه شده است. شاید در نگاه اول برد رزبری پای زیرو در ذهن شما تداعی شود اما سخت در اشتباهید :)) برد رزبری پای جا پای بردهای امبدد مانند STM, ARDUINO گذاشته است. انتخاب سخت افزار همیشه سخت بوده اما در حال حاضر با معرفی رزبری پای پیکو انتخاب بین خوب و خوب تر شده است. رزبری پای پیکو برخلاف دیگر بردهای خانواده اش فاقد اسلات میکرو اس دی MICRO SD است و فقط برای برنامه نویسی با GPIO ها ساخته و طراحی شده است. برنامه نویسی این برد و آپلود کدها هم متفاوت است و از طریق درگاه USB امکان پذیر است. در ادامه با مرجع تخصصی رزبری پای به زبان فارسی، دیجی اسپارک همراه باشید.
بخش اول: معرفی رزبری پای پیکو
رزبری پای پیکو (Raspberry Pi Pico) یک برد توسعه میکروکنترلر است که توسط شرکت رزبری پای (Raspberry Pi) توسعه و عرضه شده است. این برد به عنوان یک میکروکنترلر قدرتمند و ارزان قیمت با هدف ارائه پلتفرمی برای توسعه کاربرانی که به دنبال پروژههای الکترونیکی و سختافزاری هستند، طراحی شده است. رزبری پای پیکو از چیپ RP2040 ساخته شده است که توسط رزبری پای توسعه داده شده و دارای معماری ARM Cortex-M0+ با سرعت ۱۳۳ مگاهرتز است. Raspberry Pi Pico دارای ۲۶ پین GPIO (ورودی/خروجی عمومی) است که امکان اتصال به انواع سنسورها، دستگاهها و ماژولهای الکترونیکی را فراهم میکند. این برد از یک پورت USB برای تغذیه و اتصال به کامپیوتر یا دستگاههای دیگر به عنوان یک دستگاه USB استفاده میکند.پشتیبانی از MicroPython و C/C++: Raspberry Pi Pico از زبانهای برنامهنویسی MicroPython و C/C++ پشتیبانی میکند که به برنامهنویسان امکان برنامهنویسی آسان و قدرتمند را میدهد. برد Pico از اتصالات سریال UART، SPI، I2C و PWM پشتیبانی میکند که امکان ارتباط با دیگر دستگاهها و ماژولهای الکترونیکی را فراهم میکند.
رزبری پای Pico یک برد توسعه یافته بر پایه تراشه RP2040 است. RP2040 یک پردازنده ی ۳۲ بیتی dual ARM Cortex-M0+ Microcontroller است. تراشه از یک سیلیکون ۴۰nm با ابعاد ۷X7 میلی متری از پکیج QFN-56 SMD است. فرکانس پردازنده ۱۳۳MHz و حافظه SRAM برابر با ۲۶۴KB است. این تراشه فاقد حافظهی EEPROM و FLASH داخلی است و پس از ریست بوت لدر فایرمور را از حافظه فلش خارجی و یا از حافظه SRAM درگاه USB بارگیری میکند.

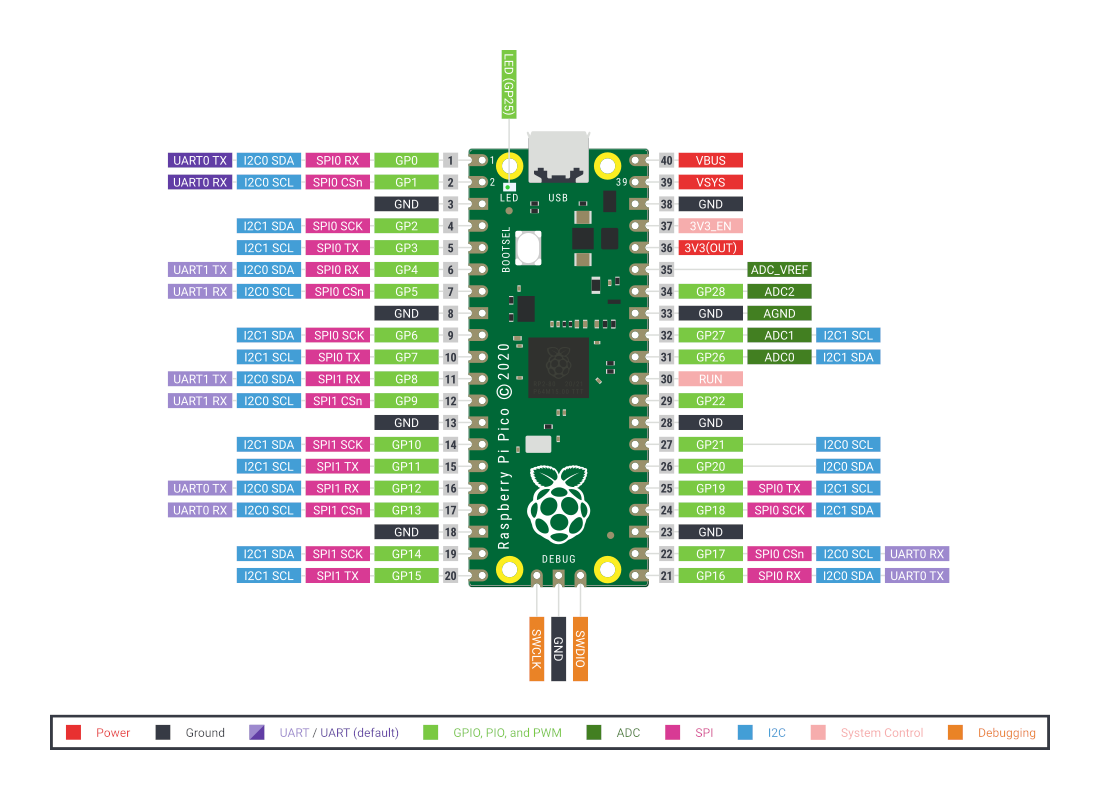
بررسی پایههای GPIO رزبری پای پیکو
برد رزبری پای پیکو از ۴۰ ردیف پین هدر با استایل ۲۱X51 با ضخامت ۱ میلی متری است. از این ۴۰ پایه ۲۶ پایه منحصرا با ولتاژ ۳٫۳ ولت برای GPIO یعنی پایه های ورودی و خروجی است. از این ۴۰ پایه ۲۳ برای پایه های دیجیتال و ۳ پایه به صورت ADC است. از پایه های دیجیتال برای اتصال سنسورها و ماژول ها با ورودی و خروجی دیجیتال و از پایه های آنالوگ با رابط ADC برای سنسورهای آنالوگ استفاده میشود. دقت داشته باشید تمامی پایه های دارای ولتاژ فیکس ۳٫۳ ولت است.
پروتکلهای ارتباطی رزبری پای Pico
برد رزبری پای پیکو از پروتکل های ارتباطی پرکاربری برای ارتباط با سخت افزارهای دیگر بهره برده است.
- دارای دو UART
- دارای دو I2C
- دارای دو SPI
- دارای کانال PWM
- دارای یک تایمر با چهار آلارم
- دارای شمارنده ریل تایم
برد رزبری پای پیکو از کوچکترین قطعات برای پشتیبانی از تراشه RP2040 استفاده کرده است از کریستال گرفته تا منبع تغذیه. اکثر پایه های میکروکنترلر RP2040 از چپ و راست به برد و پایه های IO آورده شده و چهار پایه IO از RP2040 برای عملکردهای داخلی استفاده میشود. تکنولوژی ساخت برد رزبری پای پیکو و پایه های GPIO به صورتی است که قابلیت نصب بر روی مکان های دیگر برای اجرا و ساخت پروژه ها را دارد. برای اینکار از ۴۰ ردیف پین هدر استاندارد با فاصله ی ۰٫۱ از یکدیگر قرار گرفته شده است و حتی متناسب با تمامی برد بردهای استاندارد میباشد. پیکو از یک BUCK-BOOST SMPS برای تامین ولتاژ ۳٫۳ ولت برای تعذیه RP2040 و مدار داخلی بهره میبرد. به همین دلیل انعطاف پذیری قابل توجهی برای اعمال ولتاژ وجود دارد و به راحتی میتوانید از تغذیه باتری لیتیومی تک سل و یا باتری ۳ سل AA استفاده کنید.
برنامه نویسی رزبری پای پیکو
برنامه نویسی رزبری پای پیکو از طریق درگاه USB امکان پذیر است به این صورت که برای انتقال کد از درگ اند دراپ DRAG & DROP استفاده میکنیم. کد نوشته شده را با نشانگر موس در یک فایل ذخیره و پس از اتصال رزبری پای پیکو به سیستم مورد نظر آن را به پوشه باز شده انتقال میدهیم و برنامه بر روی برد اعمال میشود. برای اینکار از تکنولوژی SWD یا همان Serial Wire Debug استفاده شده است که میتواند سیستم را ریست کرده و سپس کد را بدون دخالت و انتخاب کلیدی بر روی برد بارگیری و اجرا کند.
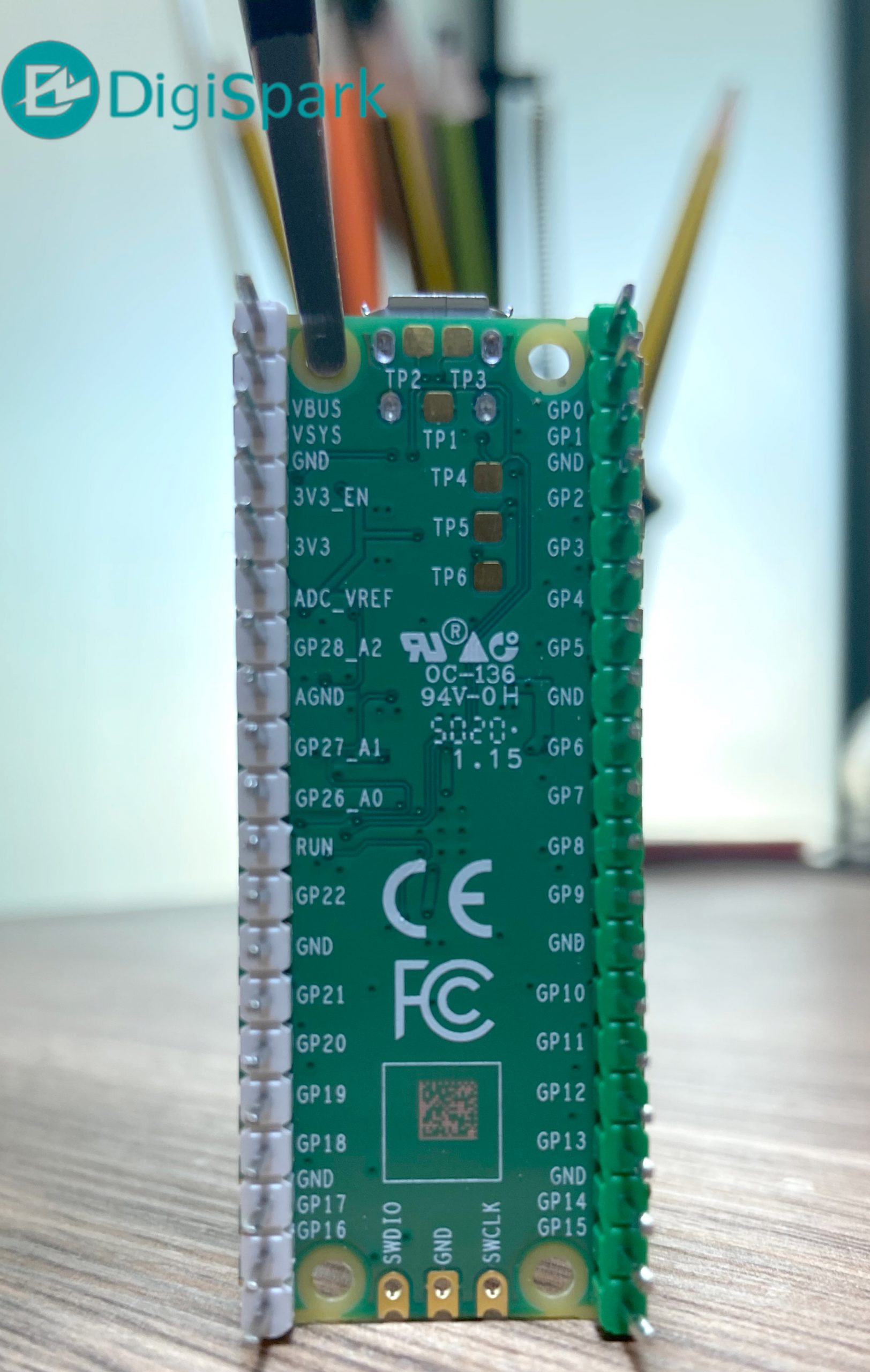
پایه های داخلی GPIO Raspberry pi Pico
برد رزبری پای پیکو از ۴۰ پایه GPIO تشکیل شده است که از این ۴۰ پایه برخی از پایه ها برای عملکردهای داخلی برد استفاده شده است.
- پایه GPIO29: برای مود ADC جهت اندازه گیری VSYS/3 استفاده شده است.
- پایه GPIO25: برای LED استفاده شده است.
- پایه GPIO24: برای IP VBUS استفاده شده است.
- پایه GPIO23: برای تامین تغذیه پاور پورت SMPS استفاده شده است.
| PIN40 | VBUS |
| PIN39 | VSYS |
| PIN37 | ۳V3_EN |
| PIN36 | ۳V3 |
| PIN35 | ADC_VREF |
| PIN33 | AGND |
| PIN30 | RUN |
- پین VBUS ولتاژ ورودی MICRO USB است.
- VSYS ولتاژ ورودی سیستم اصلی است.
- SMPS ولتاژ ۳٫۳ ولت را برای RP2040 تامین میکند.
- ۳V3_EN همان پایه تامین ولتاژ برای تراشه RP2040 است که تغذیه خارجی مدار را هم تامین میکند.
- ADC_VREF ولتاژ پاور ADC است.
- AGND پایه GND برای GPIO26-29 است.
- RUN پین فعال RP2040 است.
شرایط استفاده از رزبری پیکو
برای راه اندازی اولیه رزبری پای پیکو چه در محیط خانگی و چه صنعتی دانستن شرایط اولیه محیطی و سخت افزاری بسیار مهم است و حتی در انتخاب درست کالا با توجه به شرایط هم میتواند مفید باشد.
- ماکزیمم دمای محیط ۸۵ درجه سانتی گراد بایستی باشد.
- مینیمم دمای محیط منفی ۲۰ درجه سانتی گراد باشد.
- ولتاژ VBUS 5V +/- 10% است.
- مینیمم VSYS برابر با ۱٫۸ ولت است.
- ماکزییم VSYS برابر با ۵٫۵ ولت است.
- بهترین دمای پیشنهادی محیط برای استفاده از رزبری پای پیکو ۷۰ درجه سانتی گراد است.
برنامه ریزی فلش FLASH
توسط پورت سریال Wire debug حافظه Flash QSPI با مقدار حافظه ۲MByte قابل برنامه ریزی است. ساده ترین راه برای برنامه ریزی حافظه ی فلش رزبری پای پیکو استفاده از مود USB است. برای انجام اینکار کافیست مراحل زیر را اجرا کنید.
- تغدیه پورت را خارج کنید. هیج تغدیه ای به برد متصل نباشد.
- سپس کلید BOOTSEL را همزمان با وارد کردن پورت تغذیه MICRO USB نگه دارید.
- با اتصال کابل میکرو USB به سیستم پوشه فایل پیکو باز میشود.
- سپس کد برنامه با پسوند .uf2 را با drag and drop به پوشه باز شده انتقال دهید.
- کد بر روی رزبری پای پیکو اجرا میشود.
پایههای عمومی IO پیکو
رزبری پای پیکو دارای ولتاژ داخلی ۳٫۳ ولت است و در تمامی پایه ها ثابت است. ۲۶ پایه از ۳۰ پایه RP2040 قابل استفاده است.
- پایه های GPIO0 تا GPIO22 پایه های دیجیتال هستند.
- پایه های GPIO26 – GPIO28 به عنوان دیجیتال و ورودی ADC قابل استفاده است.
- پایه های GP0, GP1 پایه های UART هستند.
- پایه های GP26-27-28 پایه های ADC است.
- پایه های GP16-17-18-19 پایه های SPI است.
- پایه های GP4-GP5 پایه های I2C است.
استفاده از ADC رزبری پای پیکو
رابط ADC در RP2040 فاقد رفرنس است و به همین دلیل از تغذیه ۳٫۳ ولت داخلی تراشه استفاده میکند. در پیکو پایه ADC_AVDD از SMPS 3.3 ولت با استفاده از فیلتر R-C تغذیه میشود. ADC جریان زیادی در مدار مصرف میکند تا جایی که در صورت غیرفعال بودن حسگر دما تا حدود ۱۵۰ میلی آمپر جریان کشیده و به همین دلیل جریان ماسفت برابر ۱۵۰μA*200 = ~30mV خواهد بود. با استفاده از تغییر مقاومت بین پایه VREF و پایه ۳٫۳ ولت میتواند تا حدودی ماسفت و نویز ایجاد شده را کاهش دهد. برای استفاده از پایه های ADC کافیست از پین های GP26-GP27 و GP28 استفاده کنید.
تغدیه برد رزبری پای پیکو
ساده ترین راه برای تامین تغذیه برد رزبری پای پیکو استفاده از پورت MICRO USB است که از طریق پورت USB VBUS با ولتاژ ۵ ولت تغذیه میشود. در صورتیکه نمیخواهید از پورت USB برای تغذیه استفاده کنید، میتوانید از پایه ی VSYS به منبع تغذیه ی دلخواه با ولتاژ ۱٫۸ تا ۵٫۵ ولت DC اتصال دهید.تغذیه مناسب برای برد Raspberry Pi Pico بسیار مهم است تا برد به درستی کار کند و از آسیبهای ناشی از تغذیه نامناسب جلوگیری شود. Raspberry Pi Pico به ولتاژ ۳٫۳ ولت نیاز دارد. بنابراین، باید از منبع تغذیهای استفاده کنید که ولتاژ خروجی ثابت ۳٫۳ ولت داشته باشد. مطمئن شوید که منبع تغذیه برای برد Pico جریان کافی (معمولاً حداقل ۷۰۰ میلیآمپر) را ارائه میدهد. در غیر این صورت، ممکن است عملکرد برد تحت تاثیر قرار گیرد.استفاده از منبع تغذیه پایدار و خالی از نوسانات مهم است. تغذیه ناپایدار میتواند باعث مشکلات در عملکرد برد شود.از کابلهای مناسب و با کیفیت برای اتصال منبع تغذیه به برد Pico استفاده کنید.در صورت امکان، از محافظتهای الکتریکی مانند دیودهای افزونگی (تا زنر) استفاده کنید تا برد Pico از ولتاژهای بیشاندازه وارد شده محافظت شود. تغذیه به درستی متصل شده و قبل از وصل کردن تغذیه، دقت کنید که پلاریته ولتاژ (مثبت و منفی) به درستی تنظیم شده باشد تا از آسیب به برد Pico جلوگیری شود.
![]()
زبان های برنامه نویسی رزبری پای Pico
رسپری پای پیکو RASPBERRY PI PICO از به دو زبان برنامه نویسی C , MICROPYTHON قابل اجرا و برنامه نویسی است. با توجه به ماهیت و تکنولوژی ساخت با بسیاری از سنسورها و سخت افزارها ارتباط برقرار کرده و برای مبتدیان و حتی سطوح پیشرفته با توجه به پشتیبانی از میکروپایتون انتخاب مناسبی است. برای اینکار بر روی برد از رابط I2C, SPI و ۸ پایه ی برنامه پذیر برای ارتباط با سخت افزارها طراحی و ایجاد شده است.
برای برنامهنویسی برد Raspberry Pi Pico (به کمک میکروکنترلر RP2040) میتوانید از زبانهای برنامهنویسی مختلفی استفاده کنید. این برد پشتیبانی از زبانهای برنامهنویسی متنوعی دارد. دو زبان اصلی که برای برنامهنویسی Raspberry Pi Pico استفاده میشوند
- MicroPython: MicroPython نسخه کوچک و مخصوص میکروکنترلرها از زبان برنامهنویسی Python است. این زبان بسیار انعطافپذیر است و برنامهنویسان Python میتوانند به راحتی با آن کد بنویسند. MicroPython از ویژگیهای مختلفی از جمله مدیریت GPIO، اتصالات شبکه (Wi-Fi و Bluetooth)، و بسیاری از کتابخانهها و ماژولهای استاندارد Python پشتیبانی میکند.
- C/C++ با استفاده از SDK Raspberry Pi Pico: برای برنامهنویسانی که با زبانهای C و C++ آشنایی دارند، میتوانند از نرمافزار توسعه (SDK) مخصوص Raspberry Pi Pico استفاده کنند. این روش به برنامهنویسان اجازه میدهد که به سطح پایینتر سیستم دسترسی داشته باشند و به طور مستقیم با سختافزار ارتباط برقرار کنند. این روش برای پروژههایی که به کارایی و سرعت بالا نیاز دارند مناسب است.
همچنین میتوانید زبانهای برنامهنویسی دیگری مانند C#، Rust، Lua و غیره را نیز برای برنامهنویسی Raspberry Pi Pico استفاده کنید، اما MicroPython و C/C++ به عنوان روشهای اصلی و پرکاربرد معرفی میشوند. انتخاب زبان برنامهنویسی بستگی به تجربه شما و نوع پروژه دارد که میخواهید اجرا کنید.
خرید رزبری پای پیکو
در حال حاضر میتوانید جدیدترین برد رزبری پای Raspberry Pi PICO را از طریق سایت دانشجوکیت تهیه کنید. لینک خرید رزبری پای پیکو
روش فلش رزبری پای پیکو
برای فلش شدن حافظه رزبری پای پیکو که در سایت رزبری پای این مورد آموزش منتشر شده است. برای فلش رزبری پای همانند زیر اقدام کنید.
- قبل از اتصال کابل کلید bootsel را نگه دارید.
- سپس کابل usb را وصل کنید.
- فایل flash_nuke.uf2 را دنلود کنید.
- پس از اتصال کابل usb به سیستم و باز شدن پنجره RPI-RP2 پوشه دانلود شده را با روش درگ اند دراپ به RPI-RP2 انتقال دهید.
- سپس رزبری پای فلش خواهد شد.
در پایان نظرات و پیشنهادات خود را با ما درمیان بگذارید و با اشتراک گذاری این آموزش در شبکه های اجتماعی از وبسایت دیجی اسپارک حمایت کنید.
سلام خانم مهندس ممنون از توضیحات عالیتون
مثل همیشه آموزشاتون کامل و با قلمی گیرا نگارش شده
خدا قوت میگم به شما و تیم عالی دیجی اسپارک
با سلام
کاربر گرامی ضمن تشکر از شما، امیدوارم مفید واقع شده باشد.
رزبری پای کامپایلر مخصوص خودش نداره؟؟؟
Raspberry PI IDE
مثل آردوینو که کامپایلر مخصوص خودش و داره
با سلام
خیر بسته به زبان برنامه نویسی و ide هایی که از برد رزبری پای پیکو پشتیبانی میکنند، بایستی استفاده کنید.
سلام برید نرم افزار آردینو رو باز کنید از قسمت tools به قسمت Board managr برید و کلمه picoسرچ کنید تا واستون Arduino Mbe os Rp2040 Boardsبیاد و اینستال کنید تا نصب شه و بعد برگردید میبینید قسمت Board manager یه گزینه اضافه شده که میتونید رزبری پیکو را با نرم افزار آردینو برنامه نویسی کنید…
با سلام
کاربر گرامی از اینکه تجربه ی خود را دیگر کاربران دیگر به اشتراک میگذارید، صمیمانه سپاسگزارم.
سلام آیا امکان نصب سیستم عامل روی این برد وجود داره ؟ممنون میشم جواب بدین
با سلام
خیر این امکان وجود ندارد.
سلام
مم تاحالا با رزبری پای اصلاار نکردم ولی می خوام استارت بزنم و شروع کنم اما نمیدونم چه کامپایلر رو نصب کنم شما خودتون از چه کامپایلر استفاده می کنید و اینکه چه بردی از زربری بهتره برای؟؟؟؟؟ خرید من نظره خودم رو pico هست چون نیاز به سیستم عامل نمیخواد و اینکه ارزون تر هستش حالا نظر شما چی هست؟؟؟؟
با سلام
کاربر گرامی برای استفاده از رزبری پای پیکو از دو زبان برنامه نویسی C++ و میکروپایتون میتوانید استفاده کنید. برای سی پلاس پلاس از Arduino IDE میتوانید استفاده کنید. برای پایتون هم از Thonny IDE , MU Editor استفاده کنید.
بهتر است برای شروع یادگیری زبان برنامه نویسی از پیکو آغاز کنید تا مهارت بیشتری کسب کنید.
با سلام
ممنون از توضیحات مفیدتون
چرا وقتی برنامه رو با مثلا Thonny IDE مینویسیم و تغذیه یا همون پورت usb رو قطع میکنیم دوباره نیاز هست بریم داخل ide و RUN کنیم؟! چرا با وصل مجدد تغذیه برنامه ران نمیشه؟مثل بقیه میکروکنترلر ها؟ممنون میشم کسی راهنمایی کنه.نشکر
با سلام
محل ذخیره برنامه را برد انتخاب کنید مشکل حل خواهد شد.
محل ذخیره سازی داخل برد هست؟ و برنامه برای run کردن مجدد هم از داخل میکرو کد ها خوانده میشه ولی همچنان این مشکل هست و بعد از قطع تغذیه دوباره برنامه run نمیشه باید برنامه رو باز کرد و run کرد
در پایتون به دلیل استفاده از حافظه usb mass storage برنامه ذخیره نمیشود و هر بار مجدد پروگرم کنید.
اما توسط نرم افزار آردوینو کد حذف نمیشود.
سلام ببخشید وقتی برنامه رو با نرم افزار آردینو آپلود میکنم با این Eror مواجه میشم :Sketch uses 89868 bytes (4%) of program storage space. Maximum is 2097152 bytes. Global variables use 42836 bytes (15%) of dynamic memory, leaving 227500 bytes for local variables. Maximum is 270336 bytes. ………………… Failed uploading: uploading error: exit status 1
لطفا راهنمایی کنید
ممنون
با سلام
این ارور نیست و به حجم حافظه اشاره دارد. مجدد آپلود کنید.
با سلام
برای حل مشکل برنامه را با نام main.py در برد رزبری پای پیکو ذخیره کنید.
با سلام
من در حال نصب بروی سیستم هستم و حتما از سایر کشورها برای دانلود استفاده کنید.
با سلام
سپاس از همراهی شما کاربر گرامی بله بایستی از لیست کشورهای دیگر برای دانلود اقدام کنیم.
سلام و خسته نباشید
لینک آخرین ورژن فایل فلش تا این لحظه برای علاقه مندان
https://micropython.org/resources/firmware/rp2-pico-20220618-v1.19.1.uf2
با سلام
کاربر گرامی از اینکه تجربه ی خود را با دیگر کاربران به اشتراک میگذارید، صمیمانه سپاسگزاریم.
به زودی از دانشجوکیت میخرم چون آموزش هاشش منتشر شده حداقل خیالم راحته هزینه میکنم و میتونم باهاش کار کنم
با سلام
سپاس از همراهی شما کاربر گرامی
امیدوارم آموزش ها مفید واقع شود.
سلام و خسته نباشید آیا برای یادگیری باید پایتون از قبل بلد باشیم
با سلام
اگر قبلا مقدماتی کار کرده باشید سرعت و روند یادگیری سریع تری خواهید داشت. اما در کارگاه آنلاین بدون نیاز به پیش نیاز آموزش خواهم داد.
با سلام
بیس زبان میکروپایتون چیه؟
با سلام
زبان میکروپایتون از پایتون برای برنامه نویسی سخت افزار توسعه یافته است.
سلام برد pico با pico plus چه تفاوت هایی داره؟
با سلام
PICO PLUS اگر از برندهای متفرقه باشد، بایستی از دیتاشیت ها بررسی کنید.
سلام تغذیه سنسور ها را به کدام پایه باید وصل کنم
با سلام
از پایه شماره GP36 استفاده شده و ۳V3 استفاده کنید.
سلام و احترام
من میخوام ماژول فینگرپرینت AS608 رو به پیکو متصل کنم طبق داکیومنت هایی که هست پیش میرم ولی نمیتونم کتابخانه ها رو نصب کنم مثلا کتابخانه سریال و… (البته تازه کارم)
اکثر کتابخانه ها موقع نصب بهم ارور میدن
با سلام
کاربر گرامی راه اندازی این ماژول با پیکو توسط بنده تست نشده است. از دیگر کاربرانی که در این خصوص تجربه ای دارند، تقاضا میکنم در بحث شرکت کنند.
سلام
بسیار عالی و مفید
فقط یک سوال
من برنامه رو مینویسم تا وقتی رزبری پای به لپتاپ وصله برنامه اجرا میشه و با روشی هم که در بالا ذکر شده برنامه رو انتقال دادم
ولی وقتی از لپتاپ جدا میشه و به یک منبع تغذیه دیگه وصل میکنم برنام اجرا نمیشه
با سلام
برای اینکار بایستی برنامه را با نام main.py در Raspberry pi pico ذخیره کنید.
سلاک
چجوری در میکروپایتون با استفاده از ماژول ها و سنسور ها میشه ارتباط برقرار کرد؟
سلام
برای ارتباط با ماژول ها و سنسورها در میکروپایتون، از پروتکل های مختلفی مانند SPI، I2C، UART و OneWire استفاده می شود.
چگونه میتوان رزبری پای پیکو را به یک شبکه Wi-Fi متصل کرد و دستگاه را به اینترنت متصل کرد؟
با سلام
در این خصوص از بردهای وای فای ESP و یا رزبری پای پیکو مدل w باید استفاده کنید.
سلام خانم مهندس
من نیاز به ساخت یک ADC با نرخ نمونه برداری ۲۰۰ هزار سمپل بر ثانیه دارم. میخواستم بدونم با توجه به اطلاعات دیتاشیت که گفته پیکو قابلیت ۵۰۰ks بر ثانیه را دارد آیا برای انجام این کار مناسب است؟ من تا به حال موفق به انجام این کار نشده ام. به نظر می رسد باید از تکنیک دسترسی مستقیم به حافظه DMA استفاده کرد. آیا در این باره منبع یا مثالی را می توانید معرفی کنید.
سپاسگزارم
با سلام
رزبری پای پیکو RP2040 یک میکروکنترلر با قابلیت های بسیار قوی است، اما برای ساخت به بررسی جزئیات بیشتر نیاز داریم.نرخ نمونه برداری بالا نیاز به پردازش سیگنال بسیار سریع و سازگاری سیستم با سرعت بالا دارد. RP2040 میکروکنترلری با پردازنده ARM Cortex-M0+ است که با سرعت ۱۲۵ مگاهرتز عمل میکند. این سرعت پردازش قابلیت پشتیبانی از نرخ نمونه برداری ۲۰۰ هزار سمپل بر ثانیه را دارد.در صورتی که ADC به سرعت بالا داده تولید میکند، باید از یک بافر داده استفاده کنید تا بتوانید دادهها را به سرعت مورد نیاز ذخیره و پردازش کنید. RP2040 از بافر DMA برخوردار است که میتواند در انتقال دادههای با سرعت بالا کمک کند. در کل این مورد توسط بنده هم تست نشده است.
بسیار عالی
سلام
خسته نباشید با این میکروکنترلر میشه پردازش صوت انجام داد؟؟ برای هوش مصنوعی کار کردن به کار میاد یا اینکه ضعیف هست برای اینکار
با سلام
خیر از بردهایی مانند maixduino باید استفاده کنید.
آیا کسی تجربه استفاده از رزبری پیکو با keil یا cubeide داره
با سلام
کاربر گرامی این مورد توسط بنده تست نشده است. از دیگر کاربرانی که در این خصوص تجربه ای دارند، تقاضا میکنم در بحث شرکت کنند.