در این پست می خوام درباره ی ساخت فلایت کنترل توضیح بدم. فلایت کنترل اصلی ترین بخش یک ربات پرنده است که وظیفه کنترل و هدایت ربات پرنده را به عهده دارد ، ساختن فلایت کنترل کار ساده ای نیست و طراحی فلایت کنترل به اطلاعات تخصصی و کاربردی در مورد دریافت اطلاعات از سنسور ها ، کنترل کننده های PID ، فیلتر ها ، تولید پالس و سایر موارد نیاز دارد ، در این بخش یک فلایت کنترل پایه ای طراحی می کنیم که دارای تعادل مناسبی است و در آن از تمام اصول کنترلی یک کنترل کننده استفاده شده است . این فلایت کنترل در حالت X کانفیگ می شود. در شماتیک زیر از l3g4200 استفاده شده ولی شما میتوانید از mpu6050 هم استفاده کنید. مدار را مانند شماتیک زیر بر روی شیلد خود لحیم کنید. بهتر است از پین هدر برای اتصالات اسپید کنترل و …. استفاده کنید ولی تا حد امکان مدار را لحیم کنید.
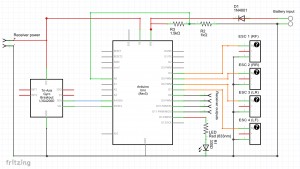
تنها یه LED روی بردمون وجود داره که LED هشدار هست و مواقعی مثل بروگرم شدن برد یا ضعیف شدن باطری یا …. چشمک میزنه.
ترتیب پایه ها
از پایه ۸ تا ۱۱ برای گیرنده رادیو کنترل استفاده میشه :
- ۸ = roll
- ۹= pitch
- ۱۰ = yaw
- ۱۱= throttle
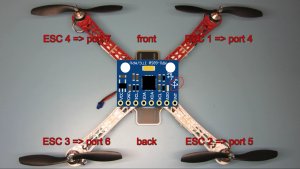
از ۴ تا ۷ آردوینو هم برای اسپید کنترل استفاده میشه :
- ۴ = راست جلو
- ۵ = راست عقب
- ۶ = چپ عقب
- ۷ = چپ جلو
سنسورتون (چه mpu6050 و چه l3g4200 هست فرقی نمیکنه) رو طوری روی بردتون لحیم کنید که محور X سنسورتون رو به جلوی کواد کوپتر باشه مانند شکل زیر:
- میتونید برای اتصال گیرنده به فلایت کنترل از کابل های fmale to fmale استفاده کنید.
- برای اتصال اسپید کنترل ها به آردوینو از پین هدر های نری تکی و دوبل استفاده کنید.
در قسمت های بعدی آموزش ، برنامه های تست فلایت رو براتون قرار میدم.
سلام . فقط کاش یه اجازه میگرفتی یا لاقل یه ذکر منبع میکردی
با تشکر .
سلام. مگه منبع شما آقای Brokking نیستند؟ من از طریق سایت شما با ایشون آشنا نشدم. کلا تو سایت های ایرانی دنبال مطلب نیستم. چون به غیر از سایت خودمون سایت مرجع دیگه ای نیست…
بله . این نوشته ها دقیقا نوشته های وبلاگ منه . و من از آقای brokking اجازه گرفتم و این مطلب هارو ترجمه کردم و در وبلاگم قرار دادم . با ذکر نام ایشون و صفحه ی یوتوب ایشون . عکس هایی که گذاشتین مثل وبلاگ منه . مهم نیس . باعث خوشحالیمه . ولی کاش یاد بگیریم ذکر منبع کنیم
در آخر پست ۶ ، اگه نگاه کرده باشین ، نام شما ذکر شده و ازتون به خاطر مطالبتون تشکر کردم. اما مطالب من کامل تر و تکمیل تر از مطالب وبلاگ شما هست. میتونید جلسه ی ۱ رو نگاه کنید….
سلام
خودت کواد ساختی
میتونی راهنماییم کنی با چه اردینویی بسازم بهتره
تقریبا قیمتش چقدر میشه؟ بدون اردینو چه فرقی میکنه ارزون تر نیست؟
بعد فرستنده گیرنده فیلم رو هم میشه وصل کرد چه جوریه میشه نمیشه؟
سلام.
۱٫اسپید کنترل ها باید چه مدلی باشند؟
۲٫مدل موتور ها ؟ و اینکه چه مدلی بهتره؟
۳٫ مشخصات باتری
۴٫سنسور mpu6050 با اون یکی سنسور چه فرقی داره و کودوم بهتره
۵٫کنترل پهباد هزینش چه قدره؟
۶٫بدنه را کوچیک بگیرم مثل تخته ۳ میل یا بزرگه پلاستیکیه بهتره؟تو قدرتش تاثیری نداره ؟ میخوام وقتی باد میاد از کنترل خارج نشه
۷ . هزینه کل چه قدر میشه
۸٫دوربین رو چه مدلی براش بگیرم
لطفا راهنمایی کنید با تشکر
سلام
این شماتیکی که گذاشتین یه توضیح بدین من که نمیدونم ماژول nrf رو کجا نصب کنم
سلام این قطعه فقط فلایت کنترل هستش و ماژول nrf نداره ولی اگه جدا خودتون گیرنده و فرستنده ساختید توی شماتیک به پین های d8 تا d11 باید وصل کنید ( شماره پین هارو بازم تو نقشه چک کنید )
پس در این کواد نیازی ب رسیور نیست؟
ببخشید میشه جواب بدین؟؟؟؟
ایا در این کواد دیگر نیازی ب رسیور نیست؟؟
سلام عرض ادب من با این خطا I2C clock speed is not set to 400kHz. (ERROR 8
مواجه میشم و رفتم داخل فایل twi.h و ۱۰۰۰۰۰Lبه۴۰۰۰۰۰L تغیر دادم ولی مشکل حل نشد لطفا راهنمایی کنین؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟
سلام ببخشید تو شمانیک بالا بخشی به نام Receiver Power وجود دارد. این بخش چه کاربردی دارد و چه کدام سوکت به آن می رود؟ سوکت باتری؟
با سلام
منظور تغذیه برد گیرنده میباشد. که مربوط به ماژول فرستنده گیرنده رادیویی است.
سلام ببخشید نحوه اتصال پایه های گیرنده به برد آردوینو رو می تونید توضیح دهید
با سلام
کاربر گرامی این بخش در شماتیک کالا توضیح داده شده است.
از راهنمایی هاتون خیلی ممنونم
سلامت باشید.
ببخشید از چه مدل گیرنده ای برای این کوادکوپتر باید استفاده کنم
با سلام
برای این منظور لطفا به آموزش ساخت رادیو کنترل مخصوص پهپاد مراجعه کنید.
ببخشید در شماتیک بالا از کدام ریسیور باید استفاده کرد؟ خانواده nrf?
با سلام
پاسخ سوال شما در بخش ساخت رادیو مخصوص پهپاد وجود دارد. به لینک مربوطه مراجعه کنید.
ببخشید در برنامه آردوینو خودمون باید گیرنده رو تعریف کنیم یا در کد های بخش ۴ به صورت آماده وجود دارد؟
با سلام
کدهای گیرنده در برد مربوط به گیرنده و کدهای فرستنده در برد مربوط به فرستنده قرار خواهند گرفت.
ببخشید در برنامه آردوینو خودمون باید مدل Recover روتعریف کنیم یا در کد های بخش ۴ به صورت آماده وجود دارد؟
با سلام
بله در کدها باید تعریف شود.
سلام
ببخشید.
Ce در فرستنده گیرنده چه معنی داره
ممنون.
با سلام
کاربر گرامی سوال شما مربوط به این بخش نمیباشد. از طریق آموزش ساخت رادیو کنترل ۴ کانال با قبلیت میکس برای هواپیما – جلسه ۲ میتوانید پاسخ سوالتان را دریافت کنید.
ببخشید گیرنده رو فقط باید تعریف کنیم یا باید چه کار هایی باید بکنه رو هم تعریف کنیم.؟
با سلام
خروجی ها را مشخص میکنید. سپس اتصالات را به سخت افزار مربوطه متصل خواهید کرد.
سلام وقت بخیر من بجای موتور براشلس موتور کورلس دارم می خوام بدونم باید از چه اسپد کنترلی باید استفاده کنم موتورم با ولتاژ ۳-۶ کارمی مکنه
ممنون می شم راهنمایی کنید
با سلام
برای کتترل موتور براشلس به اسپید کنترل نیاز است. عملا استفاده از موتور کورلس ربطی به این آموزش ندارد.
سلام
من پایه های یک گیرنده رادیوکنترل رو دیدم ولی ۴ تانیست وخیلی بیشتره چجوری باید به اردواینو متصل بشه داخل شماتیک نیست.
با سلام
بایستی دیتاشیت رادیو کنترل مورد نظر را بررسی کنید.