در ادامه آموزشهای ساخت کوادکوپتر در این پست میخواهم کدهای اصلی را قرار بدهم. در جلسات قبلی آموزش ساخت کوادکوپتر با آردوینو ابتدا اقلام مورد نیاز شامل سخت افزارهای الکترونیکی و سخت افزارهای مکانیکی را توضیح دادیم. جلسه اول سپس در بخش بعدی یعنی جلسه دوم روش ساخت فلایت کنترل را آموزش دادیم. در جلسه سوم روش اتصال رادیو کنترل به فلایت کنترل را آموزش دادیم. سپس روش کالیبره کردن را در جلسه چهارم آموزش دادیم. در بخش بعدی روش کالیبره کردن اسپید کنترل در جلسه پنجم آموزش داده شد. حال در این جلسه بخش نهایی ساخت کوادکوپتر با آردوینو را آموزش میدهیم. در ادامه این آموزش با مرجع تخصصی آردوینو به زبان فارسی، دیجی اسپارک همراه باشید.
کدهای کوادکوپتر با آردوینو
کدهای آردوینو را از قسمت زیر کپی و روی بردتان آپلود کنید. در این قسمت نیازی به استفاده از سریال مانیتور ندارید!!! دقت داشته باشید این کدها از سورس انگلیسی برداشته شده است. و کلیه کامنتهای آن به صورت انگلیسی داخل متن توضیح داده شده است. ولی از آنجایی که این آموزش مربوط به چند سال پیش است، اگر هرجایی از کدها سوالی داشتید، میتوانید از بخش نظرات سوالتان را مطرح کنید. چنانچه روش آپلود کدها را نمیدانید، به آموزش کار با برد آردوینو Arduino و نصب نرم افزار Arduino IDE مراجعه کنید.
///////////////////////////////////////////////////////////////////////////////////////
//Terms of use
///////////////////////////////////////////////////////////////////////////////////////
//THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
//IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
//FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
//AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
//LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
//OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
//THE SOFTWARE.
///////////////////////////////////////////////////////////////////////////////////////
//Safety note
///////////////////////////////////////////////////////////////////////////////////////
//Always remove the propellers and stay away from the motors unless you
//are 100% certain of what you are doing.
///////////////////////////////////////////////////////////////////////////////////////
#include <Wire.h> //Include the Wire.h library so we can communicate with the gyro.
#include <EEPROM.h> //Include the EEPROM.h library so we can store information onto the EEPROM
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//PID gain and limit settings
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
float pid_p_gain_roll = 1.4; //Gain setting for the roll P-controller (1.3)
float pid_i_gain_roll = 0.05; //Gain setting for the roll I-controller (0.05)
float pid_d_gain_roll = 15; //Gain setting for the roll D-controller (15)
int pid_max_roll = 400; //Maximum output of the PID-controller (+/-)
float pid_p_gain_pitch = pid_p_gain_roll; //Gain setting for the pitch P-controller.
float pid_i_gain_pitch = pid_i_gain_roll; //Gain setting for the pitch I-controller.
float pid_d_gain_pitch = pid_d_gain_roll; //Gain setting for the pitch D-controller.
int pid_max_pitch = pid_max_roll; //Maximum output of the PID-controller (+/-)
float pid_p_gain_yaw = 4.0; //Gain setting for the pitch P-controller. //4.0
float pid_i_gain_yaw = 0.02; //Gain setting for the pitch I-controller. //0.02
float pid_d_gain_yaw = 0.0; //Gain setting for the pitch D-controller.
int pid_max_yaw = 400; //Maximum output of the PID-controller (+/-)
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//Declaring global variables
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
byte last_channel_1, last_channel_2, last_channel_3, last_channel_4;
byte eeprom_data[36];
byte highByte, lowByte;
int receiver_input_channel_1, receiver_input_channel_2, receiver_input_channel_3, receiver_input_channel_4;
int counter_channel_1, counter_channel_2, counter_channel_3, counter_channel_4, loop_counter;
int esc_1, esc_2, esc_3, esc_4;
int throttle, battery_voltage;
int cal_int, start, gyro_address;
int receiver_input[5];
unsigned long timer_channel_1, timer_channel_2, timer_channel_3, timer_channel_4, esc_timer, esc_loop_timer;
unsigned long timer_1, timer_2, timer_3, timer_4, current_time;
unsigned long loop_timer;
double gyro_pitch, gyro_roll, gyro_yaw;
double gyro_axis[4], gyro_axis_cal[4];
float pid_error_temp;
float pid_i_mem_roll, pid_roll_setpoint, gyro_roll_input, pid_output_roll, pid_last_roll_d_error;
float pid_i_mem_pitch, pid_pitch_setpoint, gyro_pitch_input, pid_output_pitch, pid_last_pitch_d_error;
float pid_i_mem_yaw, pid_yaw_setpoint, gyro_yaw_input, pid_output_yaw, pid_last_yaw_d_error;
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//Setup routine
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
void setup(){
//Serial.begin(57600);
//Read EEPROM for fast access data.
for(start = 0; start <= 35; start++)eeprom_data[start] = EEPROM.read(start);
gyro_address = eeprom_data[32]; //Store the gyro address in the variable.
Wire.begin(); //Start the I2C as master.
//Arduino (Atmega) pins default to inputs, so they don't need to be explicitly declared as inputs.
DDRD |= B11110000; //Configure digital poort 4, 5, 6 and 7 as output.
DDRB |= B00110000; //Configure digital poort 12 and 13 as output.
//Use the led on the Arduino for startup indication.
digitalWrite(12,HIGH); //Turn on the warning led.
//Check the EEPROM signature to make sure that the setup program is executed
while(eeprom_data[33] != 'J' || eeprom_data[34] != 'M' || eeprom_data[35] != 'B')delay(10);
set_gyro_registers(); //Set the specific gyro registers.
for (cal_int = 0; cal_int < 1250 ; cal_int ++){ //Wait 5 seconds before continuing.
PORTD |= B11110000; //Set digital poort 4, 5, 6 and 7 high.
delayMicroseconds(1000); //Wait 1000us.
PORTD &= B00001111; //Set digital poort 4, 5, 6 and 7 low.
delayMicroseconds(3000); //Wait 3000us.
}
//Let's take multiple gyro data samples so we can determine the average gyro offset (calibration).
for (cal_int = 0; cal_int < 2000 ; cal_int ++){ //Take 2000 readings for calibration.
if(cal_int % 15 == 0)digitalWrite(12, !digitalRead(12)); //Change the led status to indicate calibration.
gyro_signalen(); //Read the gyro output.
gyro_axis_cal[1] += gyro_axis[1]; //Ad roll value to gyro_roll_cal.
gyro_axis_cal[2] += gyro_axis[2]; //Ad pitch value to gyro_pitch_cal.
gyro_axis_cal[3] += gyro_axis[3]; //Ad yaw value to gyro_yaw_cal.
//We don't want the esc's to be beeping annoyingly. So let's give them a 1000us puls while calibrating the gyro.
PORTD |= B11110000; //Set digital poort 4, 5, 6 and 7 high.
delayMicroseconds(1000); //Wait 1000us.
PORTD &= B00001111; //Set digital poort 4, 5, 6 and 7 low.
delay(3); //Wait 3 milliseconds before the next loop.
}
//Now that we have 2000 measures, we need to devide by 2000 to get the average gyro offset.
gyro_axis_cal[1] /= 2000; //Divide the roll total by 2000.
gyro_axis_cal[2] /= 2000; //Divide the pitch total by 2000.
gyro_axis_cal[3] /= 2000; //Divide the yaw total by 2000.
PCICR |= (1 << PCIE0); //Set PCIE0 to enable PCMSK0 scan.
PCMSK0 |= (1 << PCINT0); //Set PCINT0 (digital input 8) to trigger an interrupt on state change.
PCMSK0 |= (1 << PCINT1); //Set PCINT1 (digital input 9)to trigger an interrupt on state change.
PCMSK0 |= (1 << PCINT2); //Set PCINT2 (digital input 10)to trigger an interrupt on state change.
PCMSK0 |= (1 << PCINT3); //Set PCINT3 (digital input 11)to trigger an interrupt on state change.
//Wait until the receiver is active and the throtle is set to the lower position.
while(receiver_input_channel_3 < 990 || receiver_input_channel_3 > 1020 || receiver_input_channel_4 < 1400){
receiver_input_channel_3 = convert_receiver_channel(3); //Convert the actual receiver signals for throttle to the standard 1000 - 2000us
receiver_input_channel_4 = convert_receiver_channel(4); //Convert the actual receiver signals for yaw to the standard 1000 - 2000us
start ++; //While waiting increment start whith every loop.
//We don't want the esc's to be beeping annoyingly. So let's give them a 1000us puls while waiting for the receiver inputs.
PORTD |= B11110000; //Set digital poort 4, 5, 6 and 7 high.
delayMicroseconds(1000); //Wait 1000us.
PORTD &= B00001111; //Set digital poort 4, 5, 6 and 7 low.
delay(3); //Wait 3 milliseconds before the next loop.
if(start == 125){ //Every 125 loops (500ms).
digitalWrite(12, !digitalRead(12)); //Change the led status.
start = 0; //Start again at 0.
}
}
start = 0; //Set start back to 0.
//Load the battery voltage to the battery_voltage variable.
//۶۵ is the voltage compensation for the diode.
//۱۲٫۶V equals ~5V @ Analog 0.
//۱۲٫۶V equals 1023 analogRead(0).
//۱۲۶۰ / ۱۰۲۳ = ۱٫۲۳۱۷٫
//The variable battery_voltage holds 1050 if the battery voltage is 10.5V.
battery_voltage = (analogRead(0) + 65) * 1.2317;
//When everything is done, turn off the led.
digitalWrite(12,LOW); //Turn off the warning led.
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//Main program loop
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
void loop(){
receiver_input_channel_1 = convert_receiver_channel(1); //Convert the actual receiver signals for pitch to the standard 1000 - 2000us.
receiver_input_channel_2 = convert_receiver_channel(2); //Convert the actual receiver signals for roll to the standard 1000 - 2000us.
receiver_input_channel_3 = convert_receiver_channel(3); //Convert the actual receiver signals for throttle to the standard 1000 - 2000us.
receiver_input_channel_4 = convert_receiver_channel(4); //Convert the actual receiver signals for yaw to the standard 1000 - 2000us.
//Let's get the current gyro data and scale it to degrees per second for the pid calculations.
gyro_signalen();
gyro_roll_input = (gyro_roll_input * 0.8) + ((gyro_roll / 57.14286) * 0.2); //Gyro pid input is deg/sec.
gyro_pitch_input = (gyro_pitch_input * 0.8) + ((gyro_pitch / 57.14286) * 0.2); //Gyro pid input is deg/sec.
gyro_yaw_input = (gyro_yaw_input * 0.8) + ((gyro_yaw / 57.14286) * 0.2); //Gyro pid input is deg/sec.
//For starting the motors: throttle low and yaw left (step 1).
if(receiver_input_channel_3 < 1050 && receiver_input_channel_4 < 1050)start = 1;
//When yaw stick is back in the center position start the motors (step 2).
if(start == 1 && receiver_input_channel_3 < 1050 && receiver_input_channel_4 > 1450){
start = 2;
//Reset the pid controllers for a bumpless start.
pid_i_mem_roll = 0;
pid_last_roll_d_error = 0;
pid_i_mem_pitch = 0;
pid_last_pitch_d_error = 0;
pid_i_mem_yaw = 0;
pid_last_yaw_d_error = 0;
}
//Stopping the motors: throttle low and yaw right.
if(start == 2 && receiver_input_channel_3 < 1050 && receiver_input_channel_4 > 1950)start = 0;
//The PID set point in degrees per second is determined by the roll receiver input.
//In the case of deviding by 3 the max roll rate is aprox 164 degrees per second ( (500-8)/3 = 164d/s ).
pid_roll_setpoint = 0;
//We need a little dead band of 16us for better results.
if(receiver_input_channel_1 > 1508)pid_roll_setpoint = (receiver_input_channel_1 - 1508)/3.0;
else if(receiver_input_channel_1 < 1492)pid_roll_setpoint = (receiver_input_channel_1 - 1492)/3.0;
//The PID set point in degrees per second is determined by the pitch receiver input.
//In the case of deviding by 3 the max pitch rate is aprox 164 degrees per second ( (500-8)/3 = 164d/s ).
pid_pitch_setpoint = 0;
//We need a little dead band of 16us for better results.
if(receiver_input_channel_2 > 1508)pid_pitch_setpoint = (receiver_input_channel_2 - 1508)/3.0;
else if(receiver_input_channel_2 < 1492)pid_pitch_setpoint = (receiver_input_channel_2 - 1492)/3.0;
//The PID set point in degrees per second is determined by the yaw receiver input.
//In the case of deviding by 3 the max yaw rate is aprox 164 degrees per second ( (500-8)/3 = 164d/s ).
pid_yaw_setpoint = 0;
//We need a little dead band of 16us for better results.
if(receiver_input_channel_3 > 1050){ //Do not yaw when turning off the motors.
if(receiver_input_channel_4 > 1508)pid_yaw_setpoint = (receiver_input_channel_4 - 1508)/3.0;
else if(receiver_input_channel_4 < 1492)pid_yaw_setpoint = (receiver_input_channel_4 - 1492)/3.0;
}
//PID inputs are known. So we can calculate the pid output.
calculate_pid();
//The battery voltage is needed for compensation.
//A complementary filter is used to reduce noise.
//۰٫۰۹۸۵۳ = ۰٫۰۸ * ۱٫۲۳۱۷٫
battery_voltage = battery_voltage * 0.92 + (analogRead(0) + 65) * 0.09853;
//Turn on the led if battery voltage is to low.
if(battery_voltage < 1030 && battery_voltage > 600)digitalWrite(12, HIGH);
throttle = receiver_input_channel_3; //We need the throttle signal as a base signal.
if (start == 2){ //The motors are started.
if (throttle > 1800) throttle = 1800; //We need some room to keep full control at full throttle.
esc_1 = throttle - pid_output_pitch + pid_output_roll - pid_output_yaw; //Calculate the pulse for esc 1 (front-right - CCW)
esc_2 = throttle + pid_output_pitch + pid_output_roll + pid_output_yaw; //Calculate the pulse for esc 2 (rear-right - CW)
esc_3 = throttle + pid_output_pitch - pid_output_roll - pid_output_yaw; //Calculate the pulse for esc 3 (rear-left - CCW)
esc_4 = throttle - pid_output_pitch - pid_output_roll + pid_output_yaw; //Calculate the pulse for esc 4 (front-left - CW)
if (battery_voltage < 1240 && battery_voltage > 800){ //Is the battery connected?
esc_1 += esc_1 * ((1240 - battery_voltage)/(float)3500); //Compensate the esc-1 pulse for voltage drop.
esc_2 += esc_2 * ((1240 - battery_voltage)/(float)3500); //Compensate the esc-2 pulse for voltage drop.
esc_3 += esc_3 * ((1240 - battery_voltage)/(float)3500); //Compensate the esc-3 pulse for voltage drop.
esc_4 += esc_4 * ((1240 - battery_voltage)/(float)3500); //Compensate the esc-4 pulse for voltage drop.
}
if (esc_1 < 1200) esc_1 = 1200; //Keep the motors running.
if (esc_2 < 1200) esc_2 = 1200; //Keep the motors running.
if (esc_3 < 1200) esc_3 = 1200; //Keep the motors running.
if (esc_4 < 1200) esc_4 = 1200; //Keep the motors running.
if(esc_1 > 2000)esc_1 = 2000; //Limit the esc-1 pulse to 2000us.
if(esc_2 > 2000)esc_2 = 2000; //Limit the esc-2 pulse to 2000us.
if(esc_3 > 2000)esc_3 = 2000; //Limit the esc-3 pulse to 2000us.
if(esc_4 > 2000)esc_4 = 2000; //Limit the esc-4 pulse to 2000us.
}
else{
esc_1 = 1000; //If start is not 2 keep a 1000us pulse for ess-1.
esc_2 = 1000; //If start is not 2 keep a 1000us pulse for ess-2.
esc_3 = 1000; //If start is not 2 keep a 1000us pulse for ess-3.
esc_4 = 1000; //If start is not 2 keep a 1000us pulse for ess-4.
}
//All the information for controlling the motor's is available.
//The refresh rate is 250Hz. That means the esc's need there pulse every 4ms.
while(micros() - loop_timer < 4000); //We wait until 4000us are passed.
loop_timer = micros(); //Set the timer for the next loop.
PORTD |= B11110000; //Set digital outputs 4,5,6 and 7 high.
timer_channel_1 = esc_1 + loop_timer; //Calculate the time of the faling edge of the esc-1 pulse.
timer_channel_2 = esc_2 + loop_timer; //Calculate the time of the faling edge of the esc-2 pulse.
timer_channel_3 = esc_3 + loop_timer; //Calculate the time of the faling edge of the esc-3 pulse.
timer_channel_4 = esc_4 + loop_timer; //Calculate the time of the faling edge of the esc-4 pulse.
while(PORTD >= 16){ //Stay in this loop until output 4,5,6 and 7 are low.
esc_loop_timer = micros(); //Read the current time.
if(timer_channel_1 <= esc_loop_timer)PORTD &= B11101111; //Set digital output 4 to low if the time is expired.
if(timer_channel_2 <= esc_loop_timer)PORTD &= B11011111; //Set digital output 5 to low if the time is expired.
if(timer_channel_3 <= esc_loop_timer)PORTD &= B10111111; //Set digital output 6 to low if the time is expired.
if(timer_channel_4 <= esc_loop_timer)PORTD &= B01111111; //Set digital output 7 to low if the time is expired.
}
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//This routine is called every time input 8, 9, 10 or 11 changed state
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
ISR(PCINT0_vect){
current_time = micros();
//Channel 1=========================================
if(PINB & B00000001){ //Is input 8 high?
if(last_channel_1 == 0){ //Input 8 changed from 0 to 1
last_channel_1 = 1; //Remember current input state
timer_1 = current_time; //Set timer_1 to current_time
}
}
else if(last_channel_1 == 1){ //Input 8 is not high and changed from 1 to 0
last_channel_1 = 0; //Remember current input state
receiver_input[1] = current_time - timer_1; //Channel 1 is current_time - timer_1
}
//Channel 2=========================================
if(PINB & B00000010 ){ //Is input 9 high?
if(last_channel_2 == 0){ //Input 9 changed from 0 to 1
last_channel_2 = 1; //Remember current input state
timer_2 = current_time; //Set timer_2 to current_time
}
}
else if(last_channel_2 == 1){ //Input 9 is not high and changed from 1 to 0
last_channel_2 = 0; //Remember current input state
receiver_input[2] = current_time - timer_2; //Channel 2 is current_time - timer_2
}
//Channel 3=========================================
if(PINB & B00000100 ){ //Is input 10 high?
if(last_channel_3 == 0){ //Input 10 changed from 0 to 1
last_channel_3 = 1; //Remember current input state
timer_3 = current_time; //Set timer_3 to current_time
}
}
else if(last_channel_3 == 1){ //Input 10 is not high and changed from 1 to 0
last_channel_3 = 0; //Remember current input state
receiver_input[3] = current_time - timer_3; //Channel 3 is current_time - timer_3
}
//Channel 4=========================================
if(PINB & B00001000 ){ //Is input 11 high?
if(last_channel_4 == 0){ //Input 11 changed from 0 to 1
last_channel_4 = 1; //Remember current input state
timer_4 = current_time; //Set timer_4 to current_time
}
}
else if(last_channel_4 == 1){ //Input 11 is not high and changed from 1 to 0
last_channel_4 = 0; //Remember current input state
receiver_input[4] = current_time - timer_4; //Channel 4 is current_time - timer_4
}
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//Subroutine for reading the gyro
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
void gyro_signalen(){
//Read the L3G4200D or L3GD20H
if(eeprom_data[31] == 2 || eeprom_data[31] == 3){
Wire.beginTransmission(gyro_address); //Start communication with the gyro (adress 1101001)
Wire.write(168); //Start reading @ register 28h and auto increment with every read
Wire.endTransmission(); //End the transmission
Wire.requestFrom(gyro_address, 6); //Request 6 bytes from the gyro
while(Wire.available() < 6); //Wait until the 6 bytes are received
lowByte = Wire.read(); //First received byte is the low part of the angular data
highByte = Wire.read(); //Second received byte is the high part of the angular data
gyro_axis[1] = ((highByte<<8)|lowByte); //Multiply highByte by 256 (shift left by 8) and ad lowByte
lowByte = Wire.read(); //First received byte is the low part of the angular data
highByte = Wire.read(); //Second received byte is the high part of the angular data
gyro_axis[2] = ((highByte<<8)|lowByte); //Multiply highByte by 256 (shift left by 8) and ad lowByte
lowByte = Wire.read(); //First received byte is the low part of the angular data
highByte = Wire.read(); //Second received byte is the high part of the angular data
gyro_axis[3] = ((highByte<<8)|lowByte); //Multiply highByte by 256 (shift left by 8) and ad lowByte
}
//Read the MPU-6050
if(eeprom_data[31] == 1){
Wire.beginTransmission(gyro_address); //Start communication with the gyro
Wire.write(0x43); //Start reading @ register 43h and auto increment with every read
Wire.endTransmission(); //End the transmission
Wire.requestFrom(gyro_address,6); //Request 6 bytes from the gyro
while(Wire.available() < 6); //Wait until the 6 bytes are received
gyro_axis[1] = Wire.read()<<8|Wire.read(); //Read high and low part of the angular data
gyro_axis[2] = Wire.read()<<8|Wire.read(); //Read high and low part of the angular data
gyro_axis[3] = Wire.read()<<8|Wire.read(); //Read high and low part of the angular data
}
if(cal_int == 2000){
gyro_axis[1] -= gyro_axis_cal[1]; //Only compensate after the calibration
gyro_axis[2] -= gyro_axis_cal[2]; //Only compensate after the calibration
gyro_axis[3] -= gyro_axis_cal[3]; //Only compensate after the calibration
}
gyro_roll = gyro_axis[eeprom_data[28] & 0b00000011];
if(eeprom_data[28] & 0b10000000)gyro_roll *= -1;
gyro_pitch = gyro_axis[eeprom_data[29] & 0b00000011];
if(eeprom_data[29] & 0b10000000)gyro_pitch *= -1;
gyro_yaw = gyro_axis[eeprom_data[30] & 0b00000011];
if(eeprom_data[30] & 0b10000000)gyro_yaw *= -1;
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//Subroutine for calculating pid outputs
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//The PID controllers are explained in part 5 of the YMFC-3D video session:
//www.youtube.com/watch?v=JBvnB0279-Q
void calculate_pid(){
//Roll calculations
pid_error_temp = gyro_roll_input - pid_roll_setpoint;
pid_i_mem_roll += pid_i_gain_roll * pid_error_temp;
if(pid_i_mem_roll > pid_max_roll)pid_i_mem_roll = pid_max_roll;
else if(pid_i_mem_roll < pid_max_roll * -1)pid_i_mem_roll = pid_max_roll * -1;
pid_output_roll = pid_p_gain_roll * pid_error_temp + pid_i_mem_roll + pid_d_gain_roll * (pid_error_temp - pid_last_roll_d_error);
if(pid_output_roll > pid_max_roll)pid_output_roll = pid_max_roll;
else if(pid_output_roll < pid_max_roll * -1)pid_output_roll = pid_max_roll * -1;
pid_last_roll_d_error = pid_error_temp;
//Pitch calculations
pid_error_temp = gyro_pitch_input - pid_pitch_setpoint;
pid_i_mem_pitch += pid_i_gain_pitch * pid_error_temp;
if(pid_i_mem_pitch > pid_max_pitch)pid_i_mem_pitch = pid_max_pitch;
else if(pid_i_mem_pitch < pid_max_pitch * -1)pid_i_mem_pitch = pid_max_pitch * -1;
pid_output_pitch = pid_p_gain_pitch * pid_error_temp + pid_i_mem_pitch + pid_d_gain_pitch * (pid_error_temp - pid_last_pitch_d_error);
if(pid_output_pitch > pid_max_pitch)pid_output_pitch = pid_max_pitch;
else if(pid_output_pitch < pid_max_pitch * -1)pid_output_pitch = pid_max_pitch * -1;
pid_last_pitch_d_error = pid_error_temp;
//Yaw calculations
pid_error_temp = gyro_yaw_input - pid_yaw_setpoint;
pid_i_mem_yaw += pid_i_gain_yaw * pid_error_temp;
if(pid_i_mem_yaw > pid_max_yaw)pid_i_mem_yaw = pid_max_yaw;
else if(pid_i_mem_yaw < pid_max_yaw * -1)pid_i_mem_yaw = pid_max_yaw * -1;
pid_output_yaw = pid_p_gain_yaw * pid_error_temp + pid_i_mem_yaw + pid_d_gain_yaw * (pid_error_temp - pid_last_yaw_d_error);
if(pid_output_yaw > pid_max_yaw)pid_output_yaw = pid_max_yaw;
else if(pid_output_yaw < pid_max_yaw * -1)pid_output_yaw = pid_max_yaw * -1;
pid_last_yaw_d_error = pid_error_temp;
}
//This part converts the actual receiver signals to a standardized 1000 – ۱۵۰۰ – ۲۰۰۰ microsecond value.
//The stored data in the EEPROM is used.
int convert_receiver_channel(byte function){
byte channel, reverse; //First we declare some local variables
int low, center, high, actual;
int difference;
channel = eeprom_data[function + 23] & 0b00000111; //What channel corresponds with the specific function
if(eeprom_data[function + 23] & 0b10000000)reverse = 1; //Reverse channel when most significant bit is set
else reverse = 0; //If the most significant is not set there is no reverse
actual = receiver_input[channel]; //Read the actual receiver value for the corresponding function
low = (eeprom_data[channel * 2 + 15] << 8) | eeprom_data[channel * 2 + 14]; //Store the low value for the specific receiver input channel
center = (eeprom_data[channel * 2 - 1] << 8) | eeprom_data[channel * 2 - 2]; //Store the center value for the specific receiver input channel
high = (eeprom_data[channel * 2 + 7] << 8) | eeprom_data[channel * 2 + 6]; //Store the high value for the specific receiver input channel
if(actual < center){ //The actual receiver value is lower than the center value
if(actual < low)actual = low; //Limit the lowest value to the value that was detected during setup
difference = ((long)(center - actual) * (long)500) / (center - low); //Calculate and scale the actual value to a 1000 - 2000us value
if(reverse == 1)return 1500 + difference; //If the channel is reversed
else return 1500 - difference; //If the channel is not reversed
}
else if(actual > center){ //The actual receiver value is higher than the center value
if(actual > high)actual = high; //Limit the lowest value to the value that was detected during setup
difference = ((long)(actual - center) * (long)500) / (high - center); //Calculate and scale the actual value to a 1000 - 2000us value
if(reverse == 1)return 1500 - difference; //If the channel is reversed
else return 1500 + difference; //If the channel is not reversed
}
else return 1500;
}
void set_gyro_registers(){
//Setup the MPU-6050
if(eeprom_data[31] == 1){
Wire.beginTransmission(gyro_address); //Start communication with the address found during search.
Wire.write(0x6B); //We want to write to the PWR_MGMT_1 register (6B hex)
Wire.write(0x00); //Set the register bits as 00000000 to activate the gyro
Wire.endTransmission(); //End the transmission with the gyro.
Wire.beginTransmission(gyro_address); //Start communication with the address found during search.
Wire.write(0x1B); //We want to write to the GYRO_CONFIG register (1B hex)
Wire.write(0x08); //Set the register bits as 00001000 (500dps full scale)
Wire.endTransmission(); //End the transmission with the gyro
//Let's perform a random register check to see if the values are written correct
Wire.beginTransmission(gyro_address); //Start communication with the address found during search
Wire.write(0x1B); //Start reading @ register 0x1B
Wire.endTransmission(); //End the transmission
Wire.requestFrom(gyro_address, 1); //Request 1 bytes from the gyro
while(Wire.available() < 1); //Wait until the 6 bytes are received
if(Wire.read() != 0x08){ //Check if the value is 0x08
digitalWrite(12,HIGH); //Turn on the warning led
while(1)delay(10); //Stay in this loop for ever
}
Wire.beginTransmission(gyro_address); //Start communication with the address found during search
Wire.write(0x1A); //We want to write to the GYRO_CONFIG register (1B hex)
Wire.write(0x03); //Set the register bits as 00001000 (500dps full scale)
Wire.endTransmission(); //End the transmission with the gyro
}
//Setup the L3G4200D
if(eeprom_data[31] == 2){
Wire.beginTransmission(gyro_address); //Start communication with the address found during search.
Wire.write(0x20); //We want to write to register 1 (20 hex).
Wire.write(0x0F); //Set the register bits as 00001111 (Turn on the gyro and enable all axis).
Wire.endTransmission(); //End the transmission with the gyro.
Wire.beginTransmission(gyro_address); //Start communication with the address found during search.
Wire.write(0x23); //We want to write to register 4 (23 hex).
Wire.write(0x90); //Set the register bits as 10010000 (Block Data Update active & 500dps full scale).
Wire.endTransmission(); //End the transmission with the gyro.
//Let's perform a random register check to see if the values are written correct
Wire.beginTransmission(gyro_address); //Start communication with the address found during search
Wire.write(0x23); //Start reading @ register 0x23
Wire.endTransmission(); //End the transmission
Wire.requestFrom(gyro_address, 1); //Request 1 bytes from the gyro
while(Wire.available() < 1); //Wait until the 6 bytes are received
if(Wire.read() != 0x90){ //Check if the value is 0x90
digitalWrite(12,HIGH); //Turn on the warning led
while(1)delay(10); //Stay in this loop for ever
}
}
//Setup the L3GD20H
if(eeprom_data[31] == 3){
Wire.beginTransmission(gyro_address); //Start communicationwith the address found during search.
Wire.write(0x20); //We want to write to register 1 (20 hex).
Wire.write(0x0F); //Set the register bits as 00001111 (Turn on the gyro and enable all axis).
Wire.endTransmission(); //End the transmission with the gyro.
Wire.beginTransmission(gyro_address); //Start communication with the address found during search.
Wire.write(0x23); //We want to write to register 4 (23 hex).
Wire.write(0x90); //Set the register bits as 10010000 (Block Data Update active & 500dps full scale).
Wire.endTransmission(); //End the transmission with the gyro.
//Let's perform a random register check to see if the values are written correct
Wire.beginTransmission(gyro_address); //Start communication with the address found during search
Wire.write(0x23); //Start reading @ register 0x23
Wire.endTransmission(); //End the transmission
Wire.requestFrom(gyro_address, 1); //Request 1 bytes from the gyro
while(Wire.available() < 1); //Wait until the 6 bytes are received
if(Wire.read() != 0x90){ //Check if the value is 0x90
digitalWrite(12,HIGH); //Turn on the warning led
while(1)delay(10); //Stay in this loop for ever
}
}
}
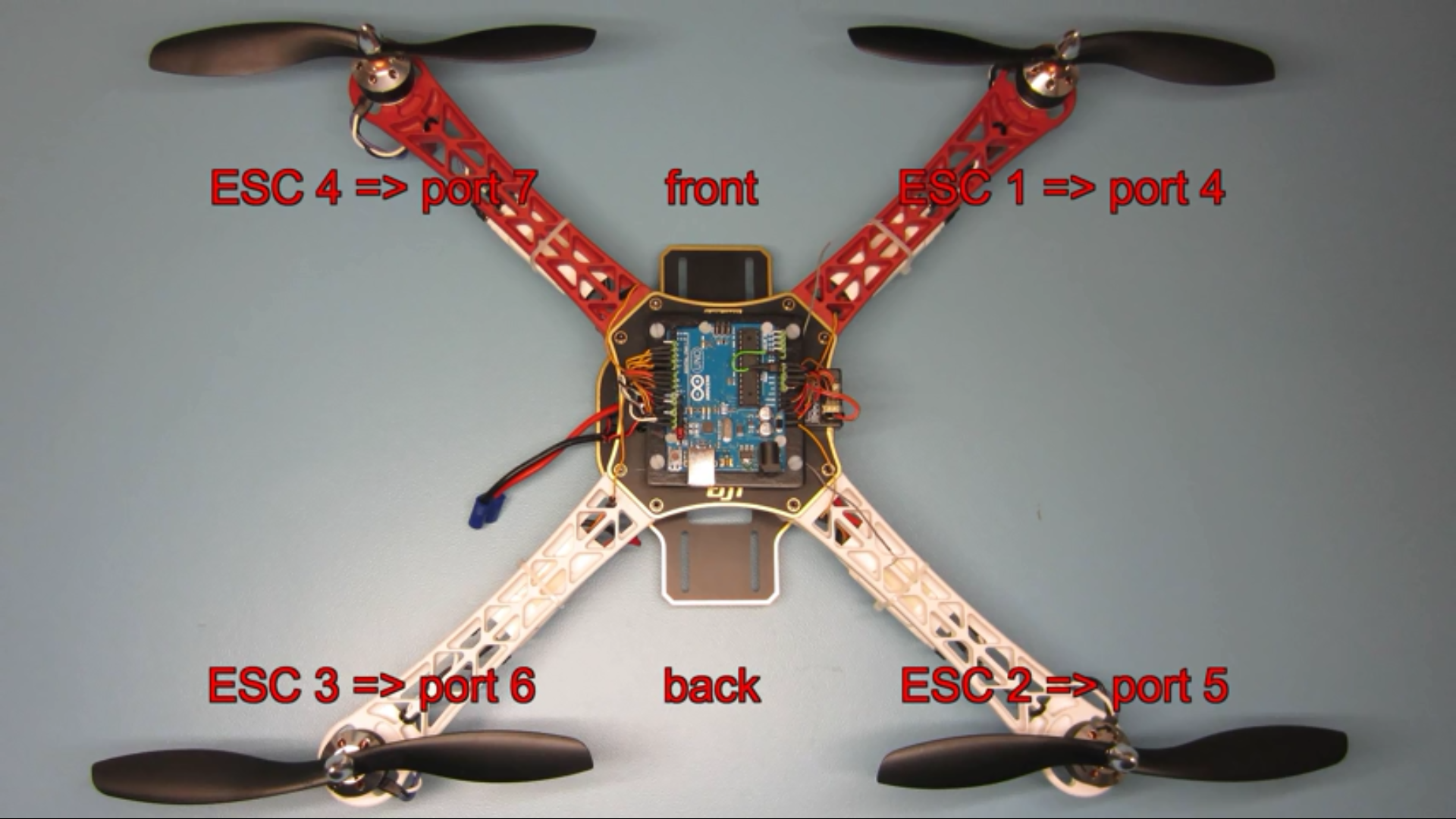
اتصالات مکانیکی کوادکوپتر
مراحل زیر رو قدم به قدم دنبال کنید
- ۱ – ملخ ها را مطابق تصویر زیر متصل کنید. چپگرد و راستگرد ملخها از داخل تصویر مشخص شده است.
- ۲ – برای تست اولیه میتوانید با نخ محکم بدنه کوادکوپتر را به تخته یا میز متصل کنید. یا از پایههای لندینگ کوادکوپتر جهت اتصال به زمین استفاده کنید. مانند تصویر زیر:

- ۳ – در ابتدا منتظر باشید تا چشمک زدنهای LED تمام شود و بعد رادیو را روشن کنید.
- ۴ – برای روشن کردن کوادکوپتر ———– تراتل (throttle) را کم و یاو (yaw) را به چپ ببرید.
- ۵ – برای خاموش کردن کوادکوپتر ———– تراتل (throttle) را کم و یاو (yaw) را راست ببرید.
- ۶ – در ابتدا که LED در حال چشمک زدن است کواد را کج نکنید یا تکان ندهید چون فلایت کنترل آن حالت را نقطهی صفر کوادکوپتر در نظر میگیرد. در این حالت وقتی تراتل را زیاد میکنید کوادکوپتر به همان صورت کج از زمین بلند خواهد شد.
- ۷ – اگر LED بعد از پنج ثانیه هنوز چشمک میزند یعنی تراتل را پایین نیاوردید. به محض اینکه تراتل رو کم میکنید چشمک زدن LED قطع میشود.
با تشکر از آقای امیری که این آموزش ها رو ترجمه کردن…
سلام .
خیلی جالب و آموزنده بود .من نیاز دارم که ی برنامه شبیه برنامه شما بنویسم .اگر امکانش هست نحوه عملکرد برنامه تون رو هم قرار بدید و یا همین برنامه رو با کامنت گذاری کامل بذارین.
و یک سوال دارم ، چرا از nrf (ماژول فرستنده گیرنده خود آردویینو) برای کنترل استفاده نکردید؟
سلام. از ماژول های nrf هم میشه استفاده کرد و کار با این ماژول ها بسیار ساده هست و علاوه بر فلایت کنترلی که آموزش داده شده باید یک رادیو کنترل با nrf درست کنین و دیگه نیازی به رادیو ی دست ساز نیست.
بله درسته من با nrf ی مقداری کار کردم ولی ی سوالی که برام پیش اومده اینه که چقدر دقیق هستن ؟ میشه به اندازه این رادیو کنترل ها روشون حساب کرد ؟ از نظر سرعت انتقال اطلاعات و یا گم شدن اطلاعات هنگام ارسال.
در اون حد نمیشه بهشون اطمینان کرد. سرعت انتقالشون هم بد نیست اما ممکنه مشکلاتی هنگام انتقال دیتا براشون پیش بیاد.
سلام. آقای فهیمی میشه به یک آردوینو هم کد های کواد هم رادیو کنترل پست های قبلی رو آپلود کرد و استفاده کرد یا باید براشون جدا جدا آردوینو تهیه کرد؟
سلام.
شما میتونید از یک آردوینو استفاده کنید که آردوینو ی uno پیشنهاد میشه… هم برای رادیو کنترل و هم فلایت کنترل. اگه بخواین رادیو کنترل رو با فلایت کنترل ترکیب کنید باید یه سری تغییرات پیچیده انجام بدید و فرستنده ی رادیو کنترل و فلایت کنترل رو با هم ادغام کنید… ولی نمیتونید بیشتر از ۴ تا موتور رو کنترل کنید. امکان هم داره سرعت پردازش به طور نامحسوس پایین بیاد. یعنی دستور های خوندن مقادیر گیرنده رو که مربوط میشه به فلایت کنترل بردارید و مقادیری رو که از سوی فرستنده دارید میفرستید ، مستقیم دریافت کنه… برای همین بهتره رادیو کنترل رو جدا و فلایت کنترل رو جدا بسازید.
خیلی ممنون ازتون واقعا خیلی کمکم کردین یه سوال کوچولو هم دارم با آردوینو میشه فلایت کنترل هواپیما رو هم ساخت ؟
بله. چرا نشه؟؟؟ با آردوینو همه کار میشه کرد. البته اگه جدای از برنامه نویسی ، خلاقیت هم داشته باشید و با فرمول های ریاضی ترکیبش کنید.
o la la این خیلی عالیه کاش یه راه برای آموزش بود راستش من چهارسال پیش با پروگرام کردن avr ها کار کردم نمیدونم اینم بتونم یا نه یعنی نمیدونم از کجا شروع کنم؟
سلام.اقا شما چکار میکنید برنامتون ارور نمیده؟؟؟؟
کدها درست هستن. دوباره امتحان کنید.
سلام میخواستم بپرسم شما خودتون هم انجام دادید یا فقط ترجمه کردین ؟چون من به این پروژه علاقه زیادی دارم و برای انجامش باید تمام وسایلش رو تهیه کن و نمی خوام ناگهان با مشکلی مواجه شم و پولم رو حروم کرده باشم.
خیلی ممنون از شما
من ۱۰۰۰ بار امتحان کردم.میدونم برنامه مشکل نداره.پس مشکل میتونه از چه چیزایی باشه؟؟؟
مدارتون و reciver رادیو کنترل رو تست کنید. موتور هاتون سالم هستن؟ میتونید با رادیو کنترل جدا امتحانشون کنید.
سلام با تشکر از سایت خوبتون و اموزش های عالیتون
من می خوام جای موتور براشلس رو با موتور دی سی یا همون کورلس عوض کنم یسری راه انداز موتور دی سی رو گرفتم شما میتونین کم کنید بگید کدوم بخش از این کد ها مربوط به موتور و اسپید کنترل هست که بشه جایگزین کننم
با تشکر از شما
سلام. شما بزرگوارید 🙂
میتونید سیم پالس ورودی درایورهاتون (راه انداز موتور DC) رو به جای سیم پالس اسپید کنترل و Gnd رو به Gnd متصل کنید. اما بهتره از براشلس استفاده کنید و سراغ کورلس نرید 🙂
سلام من میخوام که به ترتیب ساخت انواع وسیله پرنده رو پیش برم و یاد بگیرم و در نظر داشتم که اول با موتور کورلس شروع کنم که ساده تر هست و یه اشنایی پیدا کنم.اما شما میگین که سراغ کورلس نریم؟چرا؟
با سلام
برای این منظور روشهای مختلفی وجود دارد. موضوع موتور کورلس کاملا متفاوت از مفهوم براشلس ها هستند.
سلام
مرسی از مطالب خوبتون.
میشه برای ریسیورش از ماژول nrf استفاده کرد به جای ریسیور مخصوص و رادیو روهم خودم بسازم. ؟
پین های کانال های روی ماژولnrf24l01رو از کجا میشه تشخیص داد که با این ریسیور جایگزینش کنم ؟
مرسی از راهنمایی هاتون.
سلام
ممنون از ترجمه های عالی ، توضیحات خوب و صد البته سایت بی نظیرتون.
ممنون میشم اگه بنده رو راهنمایی کنید برای نصب دوربین و گیمبال بر روی این کواد ها و دوربین و گیمبال با کیفبت و مناسبی معرفی کنید و در باره ی گچونگی اتصالات سیم های اونها توضیح بدید.
متشکرم
با سلام
ضمن تشکر از توجه شما
برای این منظور میتوانید از سرو موتور و هر نوع دوربین سبکی استفاده کنید. در مورد اتصال سیم ها لطفا سوالتان را دقیق تر بیان کنید.
سلام،ممنون از آموزش.
من وقتی موتورها رو روشن می کنم دو تا که تو یه راستا هستن یکی بیشتر از اون یکی نیرو می گیره و بعد از روشن شدن موتورها به یه سمت بلند می شه . جایرو هم عوض کردم ولی باز فرقی نکرد اگه ممکنه یه راهنمایی کنید .
با سلام
ضمن تشکر از توجه شما، خب سوال شما خیلی کلی است و نمیشود راهنمایی دقیق صورت گیرد، لطفا دقیقتر با جزیات سوالتان را مطرح کنید.
تمام کار ها رو به ترتیب انجام دادم و مشکلی نداشت ولی بعد از این که throttle به چپ می برم و برای روشن شدن به وسط می یارم دو تا از موتورها با سرعت برابر روشن می شن اما دو موتور دیگه (تو این جا چپ گردها)یکی بیشتر از اون یکی دور می گیره و شروع به بلند شدن از اون طرف می کنه.تو کالیبره کردن esc ها تست جایرو هم گرفتم که درست بود ، ولی باز این اتفاق می یفته .
با سلام
ضمن تشکر از توجه شما و عذرخواهی بابت تاخیر در پاسخ، دقت داشته باشید که به هنگام کالیبره کردن، احتمالا کواد در سطح صاف قرار نداشته است. از این رو سنسور ژایرو خطا داده است.
سلام
برد های فلای کنترل بسیاری توی بازار هست با قیمت ۵۰ به بالا آیا استیبل این بردی که ساختین با آردینو در برابر این برد ها بالاست ؟ فیلم پرواز دارین ؟
من همه چیزو برای ساختش اما ده کردم فقط اینو ج بدین اگر پایین یه فلای بخرم
با سلام
ضمن تشکر از توجه شما، البته این پست را همکار دیگر بنده نوشته است. در این خصوص که میفرمایید، یک کالای DIY ممکن است کارایی همان کالای تجاری را داشته باشد ولی اصلا قابل مقایسه نیست. شما میتوانید فلایت کنترل را از بازار تهیه کنید و یا اینکه از طریق این آموزش و یا آموزشهای دیگر در وب این کار را انجام دهید.
سلام
تمام مراحل رو انجام دادم الان وقتی موتور ها روشن میشه کواد نمیتونه از زمین جدا بشه
وقتی تراتل رو بالا میبرم کج میشه اینور اونور
سایز فریمم فاصله موتور به موتور(وسط)۳۸سانت هست
وزن کلی هم ۱/۱۰۰هست تراست هر موتورم ۸۰۰ هست
باطری رو خودم درست کردم و نمیدون ضریب تخلیه که شما۳۵c زده بوید چند هست
راهنمایی کنید ممنون
ممکنه از فریم باشه چون ملخ ها در زمان موازی بودن ۴سانت باهم فاصله دارن
با سلام
از سنسور ژایرو استفاده نکردهاید؟
سلام سنسور ۶۰۵۰ هم دارم ملخ هم خریدم فرقی نداره وقتی تک تک موتور هارو تست میکنم تو کالیبره اسپید کنترل موتور ها بنظرم قدرت کافی رو دارن فقط زمانی که برنامه فلایت کنترل رو آپلود میکنم بنظرم موتور ها به قدرت کافی نمیرسن تراتل از وسط که میگذره انگاه دور موتورها ثابت میمونه
با سلام مجدد
جریان مورد نیاز را از چه منبعی تامین میکنید؟
سلام باطری لیتیوم بود که ۳ سل یا ۴ سل بود
الان درست شده خود ب خود
الان با باطری لیتیوم قلمی ۴ سل تست کردم اوکی ولی گذاشتم شارژ بشه کامل تا تست بگیرم بعد خبرشو میدم
سلام مجدد
در این مورد که میفرمایید جریاندهی باتری بسیار اهمیت دارد. پارامتر C مربوط به باتریها لیتیومی در خروجی جریان آنها بسیار اهمیت دارد.
سلام میخواستم بپرسم شما خودتون این پروژه رو انجام دادین یا فقط ترجمه کردین ؟؟؟
من علاقه زیادی به این پروژه دارم و برای انجامش باید تمام قطعات رو تهیه کنم
و نمی خوام ناگهان با مشکلی مواجه بشم و هم وقت و هم پولم رو حروم کرده باشم
آیا واقعاً بازده خوبی داره یعنی می ارزه به وقت و پولی که باید خرج کرد؟؟؟
خیلی ممنون از شما و سایت خوبتون.
با سلام
البته که بخشی از این آموزش به صورت ترجمه است. ولی آقای فهیمی که این پروژه را به صورت عملی انجام دادهاند، در حال حاضر در دسترس نیستند.
سلام من خیلی وقته که دنبال ساخت یک پهباد با اردوینو بودم .
اما من یک سوال دارم .
میشه به اردوینو یک ماژول nrf وصل کرد .
یا میشه به اردوینو یک ماژول بلوتوث وصل کرد و کواد کوپتر را با نرم افزار موبایل کنترل کرد اگر میشه لطفاً. راهنمایی کنید .
با سلام
بله امکان اتصال NRF و ماژول بلوتوث به آردوینو و مدیریت با اپلیکیشن فراهم است اما نیاز به دانش برنامه نویسی خواهد داشت.
سلام خیلی ممنون از آموزش بسیار خوبتون
فقط یه چیز
میشه در کنار اینهمه آموزش فوق الاده یک آموزش کامل آردنیو هم بزارید
یا حد اقل کلاس های آنلاین آموزش آردنیو بزارید
خیلی سایت عالی دارید این اموزش هارو هم بزارید خیلی عالی تر میشه
باتشکر
با سلام
سپاس از همراهی شما، کاربر گرامی در حال حاضر بیش از ۱۴۰۰ عدد آموزش فقط با برد آردوینو در دیجی اسپارک منتشر شده است. جهت دسترسی کافیست به لینک زیر مراجعه کنید.
آموزش آردوینو
سلام. ببخشید من قسمت اول این آموزش رو در سایتتون پیدا نکردم
با سلام
کافیست عبارت کوادکوپتر را در سایت جستجو کنید. لینک زیر را بررسی کنید.
آموزش کوادکوپتر
با سلام و آرزوی بهترینها
یه سوال داشتم و اون اینکه روی پورتهای esc اگر با ولتمتر تست بگیریم در حالت فول تراتل حدود ۲٫۲۲ ولت میافته ، این طبیعیه ؟ به این خاطر این سوال رو می پرسم که در حالت فول تراتل سرعت موتورها به حداکثر نمیرسه؟
با سلام
بنده در این خصوص اطلاعات دقیقی ندارم، از دیگر کاربرانی که در این مورد تجربه کافی دارند، تقاضا دارم تا در این بحث شرکت کنند.
سلام باز گشت خودکار به خونه هم داره این پروژه
با سلام
خیر
سلام میخواستم بدونم میشه nrf را به فلایت کنترل های توی بازار وصل کنم واگه میشه بگیید که چطور ریموت دست ساز را با فلایت کنترل ست کنم. بدون اردینو
با سلام
بله امکان پذیر هست ولی NRF فقط ماژول رادیویی است و MCU نیست. برای این منظور حتما بایستی از یک برد میکروکنترلر هم در کنار این مورد بهره ببرید.
کسی ب مفهوم برنامه دقت کرده ؟ وقتی کج میشه این برنامه سرعت موتور براشلس هارو چجور کم و زیاد میکنه ؟ یدونه یدونه کم و زیاد میکنه تا به ۰ برسه؟ میشه یکی مکانیزم این قسمت از برنامه رو توضیح بده ؟