دست ها را بالا ببرید! پاهایتان را به جلو کش دهید و بدن را به چپ و راست بچرخانید. خستگیتان در نرفت؟ خوب چند دقیقه از پشت میز بلند شوید و راه بروید پیش از آنکه با صندلی یکی شوید. در این آموزش به معرفی ساخت دستبند ویبراتور دار با استفاده از آردوینو جما (Gemma) می پردازیم. در ادامه با دیجی اسپارک همراه باشید.
تکنولوژی به همان اندازه که ما را در خانه و پشت میزمان میخ کوب کرده، در تلاش است ما را مجبور به تحرک و ورزش بیشتر نیز کند. حتی بازی های رایانه ای را به گونه ای طراحی می کنند که با حرکات بدن اجرا شوند. اما گاهی چنان در کار غرق می شویم که حتی کپسول اکسیژن نیز چاره ساز نیست. پس راهکار چیست؟ به خودمان برق وصل کنیم. چرا که نه؟ در ادامه با ما همراه باشید تا چگونگی ساخت دستبند ویبراتور دار شوک دهنده را بررسی کنیم.
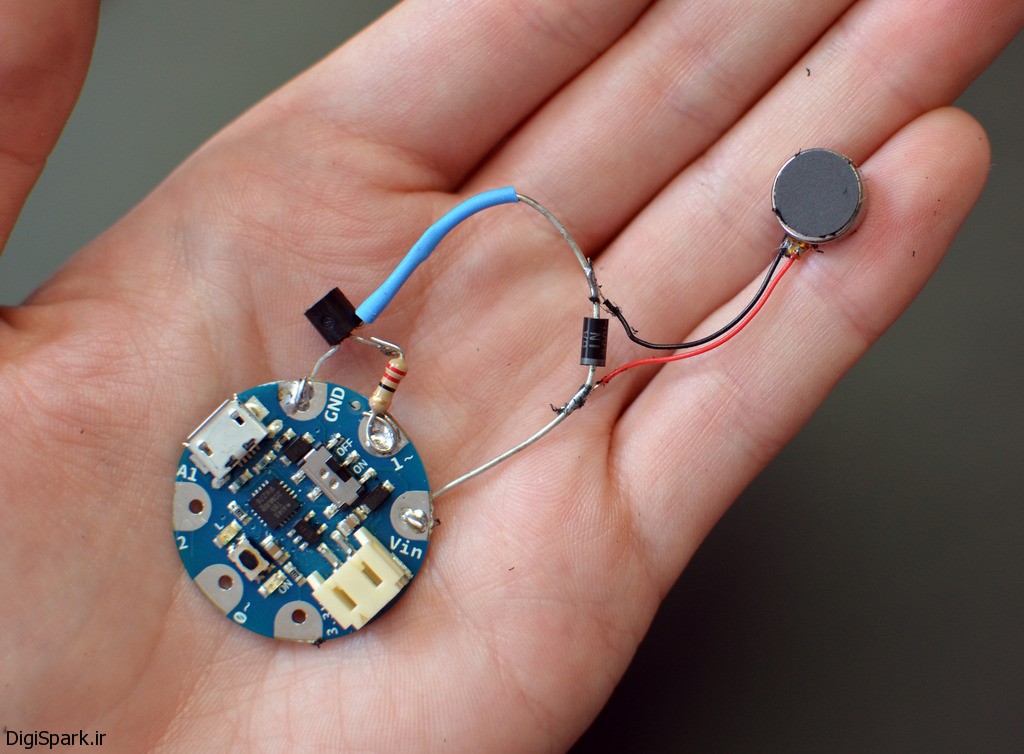
برای ساخت این پروژه به قطعات زیر نیاز دارید:
برد برنامه پذیر Arduino GEMMA
دیسک مینی موتور ارتعاشی
دیود ۱N4001
ترانزیستور PN2222 NPN
مقاومت ~۲۰۰-۱K ohm
لاستیک شرینک حرارتی
لحیم و ایزارهای دیگر
چند تکه نوار چرمی
نوار چسب و ماژیک
برد جما یک برد کوچک و برنامه پذیر است که برای گجت های پوشیدنی بسیار مناسب است. این برد پوشیدنی دارای پردازشگر Attiny85 و پنج پین I/O است.
این مدار توسط دیجی اسپارک تست نشده است.
// Mindfulness Bracelet sketch for Adafruit/Arduino Gemma. Briefly runs
// vibrating motor (connected through transistor) at regular intervals.
// This code is not beginner-friendly, it does a lot of esoteric low-level
// hardware shenanigans in order to conserve battery power.
const uint32_t // These may be the only lines you need to edit...
onTime = 2 * 1000L, // Vibration motor run time, in milliseconds
interval = 60 * 1000L; // Time between reminders, in milliseconds
// It gets progressively geekier from here...
// Additional power savings can optionally be realized by disabling the
// power-on LED, either by desoldering or by cutting the trace from 3Vo
// on the component side of the board.
// This sketch spends nearly all its time in a low-power sleep state...
#include <avr/power.h>
#include <avr/sleep.h>
// The chip's 'watchdog timer' (WDT) is used to wake up the CPU when needed.
// WDT runs on its own 128 KHz clock source independent of main CPU clock.
// Uncalibrated -- it's "128 KHz-ish" -- thus not reliable for extended
// timekeeping. To compensate, immediately at startup the WDT is run for
// one maximum-duration cycle (about 8 seconds...ish) while keeping the CPU
// awake, the actual elapsed time is noted and used as a point of reference
// when calculating sleep times. Still quite sloppy -- the WDT only has a
// max resolution down to 16 ms -- this may drift up to 30 seconds per hour,
// but is an improvement over the 'raw' WDT clock and is adequate for this
// casual, non-medical, non-Mars-landing application. Alternatives would
// require keeping the CPU awake, draining the battery much quicker.
uint16_t maxSleepInterval; // Actual ms in '8-ish sec' WDT interval
volatile uint32_t sleepTime = 1; // Total milliseconds remaining in sleep
volatile uint16_t sleepInterval = 1; // ms to subtract in current WDT cycle
volatile uint8_t tablePos = 0; // Index into WDT configuration table
void setup() {
// Unused pins can be set to INPUT w/pullup -- most power-efficient state
pinMode(0, INPUT_PULLUP);
pinMode(2, INPUT_PULLUP);
// LED shenanigans. Rather that setting pin 1 to an output and using
// digitalWrite() to turn the LED on or off, the internal pull-up resistor
// (about 10K) is enabled or disabled, dimly lighting the LED with much
// less current.
pinMode(1, INPUT); // LED off to start
// AVR peripherals that are NEVER used by the sketch are disabled to save
// tiny bits of power. Some have side-effects, don't do this willy-nilly.
// If using analogWrite() to for different motor levels, timer 0 and/or 1
// must be enabled -- for power efficiency they could be turned off in the
// ubersleep() function and re-enabled on wake.
power_adc_disable(); // Knocks out analogRead()
power_timer1_disable(); // May knock out analogWrite()
power_usi_disable(); // Knocks out TinyWire library
DIDR0 = _BV(AIN1D) | _BV(AIN0D); // Digital input disable on analog pins
// Timer 0 isn't disabled yet...it's needed for one thing first...
// The aforementioned watchdog timer calibration...
uint32_t t = millis(); // Save start time
noInterrupts(); // Timing-critical...
MCUSR &= ~_BV(WDRF); // Watchdog reset flag
WDTCR = _BV(WDCE) | _BV(WDE); // WDT change enable
WDTCR = _BV(WDIE) | _BV(WDP3) | _BV(WDP0); // 8192-ish ms interval
interrupts();
while(sleepTime); // Wait for WDT
maxSleepInterval = millis() - t; // Actual ms elapsed
maxSleepInterval += 64; // Egyptian constant
power_timer0_disable(); // Knocks out millis(), delay(), analogWrite()
}
const uint32_t offTime = interval - onTime; // Duration motor is off, ms
void loop() {
pinMode(1, INPUT_PULLUP); // LED on (using internal pullup)
ubersleep(onTime); // Delay while LED/motor on
pinMode(1, INPUT); // LED off
ubersleep(offTime); // Delay while off
}
// WDT timer operates only in specific intervals based on a prescaler.
// CPU wakes on each interval, prescaler is adjusted as needed to pick off
// the longest setting possible on each pass, until requested milliseconds
// have elapsed.
const uint8_t cfg[] PROGMEM = { // WDT config bits for different intervals
_BV(WDIE) | _BV(WDP3) | _BV(WDP0), // ~8192 ms
_BV(WDIE) | _BV(WDP3) , // ~4096 ms
_BV(WDIE) | _BV(WDP2) | _BV(WDP1) | _BV(WDP0), // ~2048 ms
_BV(WDIE) | _BV(WDP2) | _BV(WDP1) , // ~1024 ms
_BV(WDIE) | _BV(WDP2) | _BV(WDP0), // ~512 ms
_BV(WDIE) | _BV(WDP2) , // ~256 ms
_BV(WDIE) | _BV(WDP1) | _BV(WDP0), // ~128 ms
_BV(WDIE) | _BV(WDP1) , // ~64 ms
_BV(WDIE) | _BV(WDP0), // ~32 ms
_BV(WDIE) // ~16 ms
}; // Remember, WDT clock is uncalibrated, times are "ish"
void ubersleep(uint32_t ms) {
if(ms == 0) return;
tablePos = 0; // Reset WDT config stuff to
sleepInterval = maxSleepInterval; // longest interval to start
configWDT(ms); // Set up for requested time
set_sleep_mode(SLEEP_MODE_PWR_DOWN); // Deepest sleep mode
sleep_enable();
while(sleepTime && (tablePos < sizeof(cfg))) sleep_mode();
noInterrupts(); // WDT off (timing critical)...
MCUSR &= ~_BV(WDRF);
WDTCR = 0;
interrupts();
}
static void configWDT(uint32_t newTime) {
sleepTime = newTime; // Total sleep time remaining (ms)
// Find next longest WDT interval that fits within remaining time...
while(sleepInterval > newTime) {
sleepInterval /= 2; // Each is 1/2 previous
if(++tablePos >= sizeof(cfg)) return; // No shorter intervals
}
uint8_t bits = pgm_read_byte(&cfg[tablePos]); // WDT config bits for time
noInterrupts(); // Timing-critical...
MCUSR &= ~_BV(WDRF);
WDTCR = _BV(WDCE) | _BV(WDE); // WDT change enable
WDTCR = bits; // Interrupt + prescale
interrupts();
}
ISR(WDT_vect) { // Watchdog timeout interrupt
configWDT(sleepTime - sleepInterval); // Subtract, setup next cycle...
}
عاللللللللی
خدا قوت
ممنون
با سلام جناب آقای اروند طباطبایی
لطفا آموزش گام به گام ساخت دستگاه تنس عضلانی یا منقبض کننده عضلات Electro Stimulator را قرار دهید. این دستگاه برای افراد مختلف بخصوص برای افرادی که دارای ناتوانی جسمی هستند مورد نیاز هست اما نمونههای همین دستگاه با قیمتهای بالایی به فروش میرسند. اگر بشود خود افراد این دستگاه را آماده کنند خیلی خوب است.
با سلام و تشکر از شما
به روی چشم، پیگیری میکنم، در صورتی که امکان پذیر باشد، حتما اقدام خواهیم کرد.
با سلام
امکانش هست مداری رو سفارش بدم و برام بسازید و برام ارسال کنید
با سلام
خیر چنین خدماتی نداریم.