
در گذشته وقتی به آسمان نگاه میکردند، فقط ماه و ستارهها دیده میشدند. با اختراع تلسکوپ در ابتدای قرن شانزدهم تمامی باورها نسبت به آسمان تغییر کرد. دانشمندان فهمیدند که تنها ماه و ستاره در آسمان وجود ندارد بلکه ماه و ستاره تنها آغاز یک جستجوی بیانتها میباشد. در ماموریت آپولو ۱۱ که در تاریخ ۲۰ ژوئیه ۱۹۶۹ نخستین انسان که نیل آرمسترانگ بود پا به ماه گذشت، شروع کنجکاوی انسان برای شناخت اطراف خود و آغاز سفر های فضایی برای کشف دنیای ناشناخته بود. بعد از گذشت چندین سال انسان پا فراتر گذاشت و فضا پیما ها و ربات هایی به مریخ فرستاد. در این پست قصد دارم در مورد ربات Rov-E که قرار است در ماموریت مریخ ۲۰۲۰ به فضا پرتاب شود صحبت کنم و آنرا معرفی کنم.
ربات ROV-E مریخ نورد
ربات ROV-E یک ربات مریخ نورد با قدرت تحلیل کامپیوتر میباشد. توانایی یادگیری و پاسخ دادن به سوالات را دارد. شما میتوانید جهت پرسیدن سوالات خود در زمینهی سیاره مریخ به سایت ربات Rov-E مراجعه نماید. از قسمت پرسش سوال، سوال خود را مطرح نمایید و در کوتاه ترین زمان ممکن جواب خود را بدست آورید. (لینک سایت)

سازندگان ربات ROV-E
این ربات توسط مهندسان جوان ساخته شده است و این یک پروژه ی متن باز است، توسعه دهندگان میتوانند از طریق گیت هاب فایل کد های ربات را دانلود و خود یک ربات ROV-E بسازند. جهت دانلود سورس کد اینجا کلیک کنید.

شبیه ساز ربات ROV-E
آزمایشگاه پیشرانش جت ناسا برای ربات یک شبیه ساز تحت وب طراحی کرد است که علاقمندان میتوانند جهت راندن ربات به صورت شبیه سازی شده در سطح مریخ به سایت شبیه ساز مراجعه کنند و ربات را در سطح مریخ به صورت شبیه سازی شده کنترل کنند. (لینک سایت)
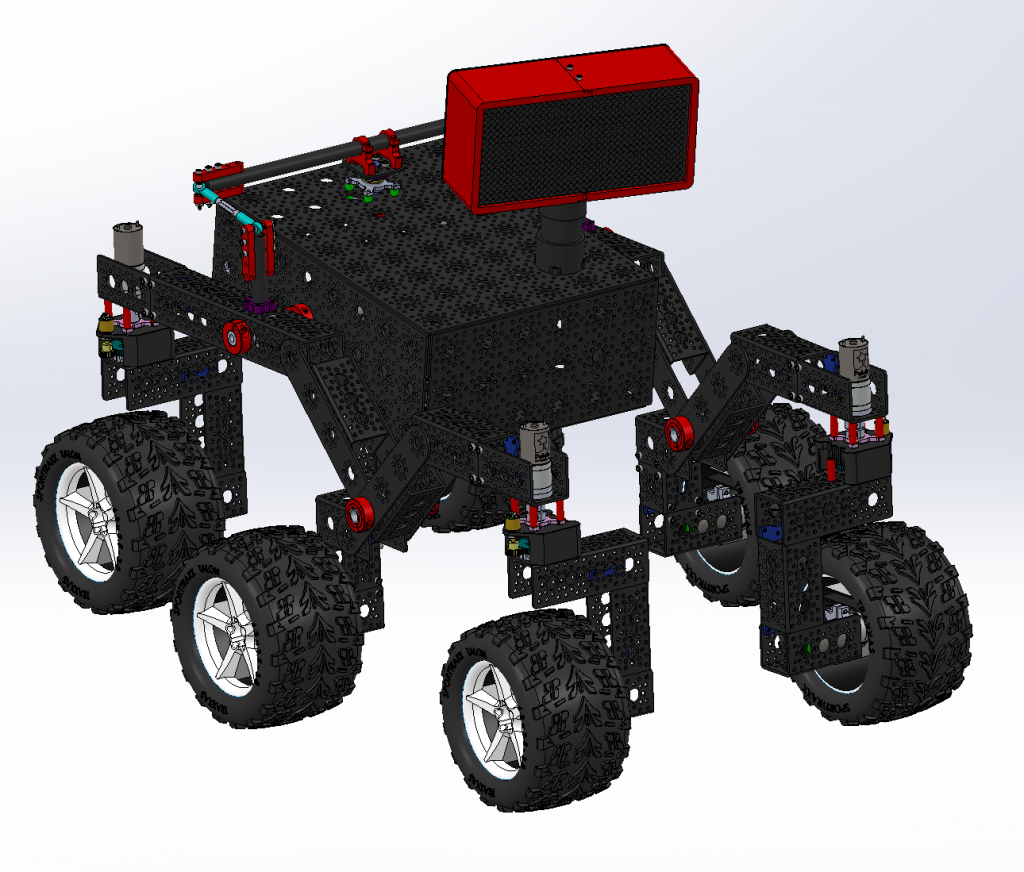
بخشهای ربات ROV-E
ربات ROV-E از ۶ قسمت اصلی تشکیل شده است.
- LED FACE
- CORNER STEERING
- ROCKER-BOGIE SUSPENSION SYSTEM
- CHASSIS & ELECTRONICS
- DIFFERENTIAL PIVOT
- WHEEL & TIRE ASSEMBLY
LED FACE
یک نمایشگر LED با رنگ های آبی، سبز و قرمز قابل برنامه ریزی است که میتواند نمایش دهنده ی احساسات ربات ( خنده – گریه و…) باشد. علاوه بر LED های رنگی یک لیزر حفاری و بسته های پیشرفته ی دوربین به سر ربات متصل است.
CORNER STEERING
چرخ های زاویه ای در این ربات این فرصت را ایجاد میکند که بدون نیاز به حرکت رو به جلو یا عقب ربات بتواند در جای خود بچرخد و باعث چرخش بسیار دقیق و ظریف موقع حرکت شود.
ROCKER-BOGIE SUSPENSION SYSTEM
سیستم تعلیق برای طراحی مانورهای شدید در زمین سنگی و ناگهانی مانند مریخ طراحی شده است. این سیستم به طور خاص طراحی شده است تا تمام ۶ چرخ همیشه روی زمین بماند و حداکثر کشش ربات را حفظ کند. دلیل استفاده از این طرح این است که سیستم تعلیق با چرخ شاسی بلند میتواند به آسانی روی بلوکی که دو برابر چرخ ارتفاع دارد صعود کند.
CHASSIS & ELECTRONICS
این قسمت مغز ربات را شامل میشود و از آلومینیوم سبک وزن تشکیل شده است. سنسور های ارتباطی ربات در این قسمت قرار گرفته است و قابلیت کنترل از طریق گوشی هوشمند را نیز دارد.
DIFFERENTIAL PIVOT
بخشی از سیستم چرخش چرخدنده، چرخش دیفرانسیل است. که وظیفه ی انتقال وزن ربات را از سمتی به سمت دیگر در طول ربات به منظور حفظ سطح ربات در برخورد با موانع بر عهده دارد. این سیستم به ربات کمک میکند تا موانع را بدون از دست دادن سطح کشش رد کند.
WHEEL & TIRE ASSEMBLY
چرخ های ربات از پلاستیک تشکیل شده اند و بسیار نرم هستند. این چرخ ها قابلیت وفق پذیری با شکل مانع را دارا هستند که به ربات امکان صعود آسان به مانع را میدهد.
ماموریت ربات ROV-E
مأموریت کاوشگر مریخ ۲۰۲۰ که نام دیگر ربات Rov-E است، به منظور اجرای یک بررسی اختر زیست شناسانه در رابطه با پیشینهٔ باستانی مریخ، بررسی فرایندهای ژئولوژیکی سطح مریخ در طول تاریخ خود، در نظر گرفته شده است. از جمله ارزیابی زیست پذیری سیارهای و امکان وجود بر روی مریخ در گذشته، و توان بالقوهٔ آن سیاره برای نگهداری رد پای زیست در موادِ قابل دسترسِ تشکیلدهندهٔ سطح آن است.
حمایت
نظرات و پیشنهادات خود را با ما درمیان بگذارید و با اشتراک گذاری این آموزش در شبکه های اجتماعی , از وبسایت دیجی اسپارک حمایت کنید.
سلام برای بخش هوش مصنوعی و پردازش تصویر و صدای این پروژه از چه سخت افزار و نرم افزار استفاده شده و مکانیک این پروژه به چه سخت افزاری نیاز دارد
با سلام و تشکر از شما
برای این منظور بایستی اطلاعات فنی این ربات را از سایت تولید کننده دریافت کنید.