هر درایور موتور ویژگیهای منحصر به فرد خود را دارد. پیش از این راه اندازی موتورهای مختلف با درایورهای متنوع را در دیجی اسپارک منتشر کردهایم. اما یکی از درایور موتورهای ساده و ارزان قیمت، که مورد توجه دانش آموزان و دانشجوها میباشد. درایور موتور L298N میباشد. تراشه این درایور خیلی قدرت و پتانسیل مناسبی ندارد. صرفا یک درایور جهت راه اندازی موتورهای ارزان قیمت و ساده است. از اینرو انتظار خیلی زیادی از این درایور نداشته باشید. در ادامه این آموزش شیوه کنترل دور موتور با Joystic با مرجع تخصصی آردوینو به زبان فارسی، دیجی اسپارک همراه باشید.
درایور موتور L298N
درایور موتور L298N از تراشه دوبل L298 یک رگولاتور داخلی ۵ ولت ۷۸M05 تشکلیل شده است. در ساختار این درایور موتور از مدار H Bridge یا همان پل H استفاده شده است. این مدار توانایی درایور و کنترل جریان را دارد که توسط پایه PWM کنترل میشود. پایه PWM یا همان مدولاسیون پهنای باند کنترل مدت زمان یک پالس را انجام میدهد و در نتیجه ولتاژ خروجی را کنترل خواهد کرد. ولتاژ کاری درایور موتور L298 بین ۵ تا ۳۵ ولت DC است. در بخش اول آموزش درایور موتور L298، دو موتور MOTOR DC را راه اندازی کردیم. در بخش دوم آموزش، توسط ماژول ولوم کشویی یا Slide Pot سرعت دور موتور را کنترل کردیم. برای اطلاعات بیشتر بر روی لینک های زیر کلیک کرده و مطالعه کنید.
آموزش کار با ماژول درایور موتور L298N – بخش اول
آموزش کار با ماژول درایور موتور L298N – بخش دوم
ماژول جوی استیک Joystick
جوی استیک Joystick PS2 یک ماژول با خروجی آنالوگ و قابلیت شبیه سازی مختصات اهرم در راستای دو محور X و Y میباشد. در بسیاری از پروژههای رباتیک نیاز به جوی استیک کاملا مشهود است. ماژول جوی استیک JoyStick قابلیت حرکت در تمام زوایا در راستای محور X , Y را دارد. بر روی ماژول جوی استیک JoyStick دو پتانسیومتر ۱۰ کیلو با زاویه ۹۰ درجه در کنار یکدیگر قرار گرفتهاند. با تغییر وضعیت اهرم قرار گرفته شده بر روی ماژول در راستای محور X,Y بسته به مسیر و جهت انتخابی، ولتاژ خروجی بین ۰ تا ۵ ولت DC تغییر خواهد کرد. هنگامی که ماژول جوی استیک را به میکروکنترلر متصل میکنید، در خروجی تا مقدار ۵۱۲ را در حالت Resting میتوانید بخوانید. در حالت کلی با تغییر اهرم ماژول جوی استیک مقدار ۰ تا ۱۰۲۳ را میتوانید در خروجی ماژول ببینید. ماژول جوی استیک JoyStick دارای ۴ پایه به ترتیب GND , 5v , VRx , VRy , SW میباشد. پایه VRx مروبط به تغییرات اهرم جوی استیک در راستای محور X همان محور افقی میباشد. پایه VRy مروبط به تغییرات اهرم جوی استیک در راستای محور Y همان محور عمودی میباشد. پایه SW مربوط به کلید فشاری بر روی ماژول میباشد. در آموزش راه اندازی ماژول جوی استیک JoyStick پکیج ۳۷ سنسور آردوینو توضیحات کامل ارائه شده است. بر روی لینک کلیک کرده و مطالعه نمایید. آموزش راه اندازی ماژول جوی استیک JoyStick پکیج ۳۷ سنسور آردوینو
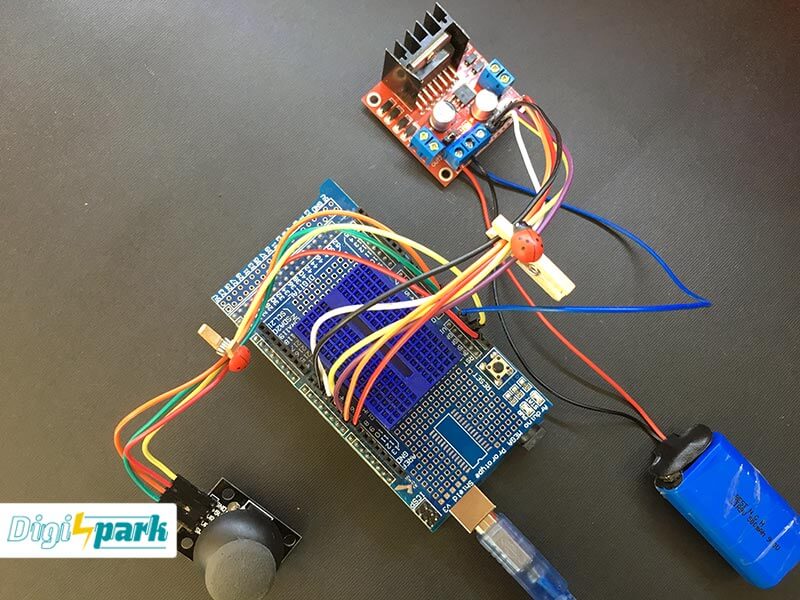
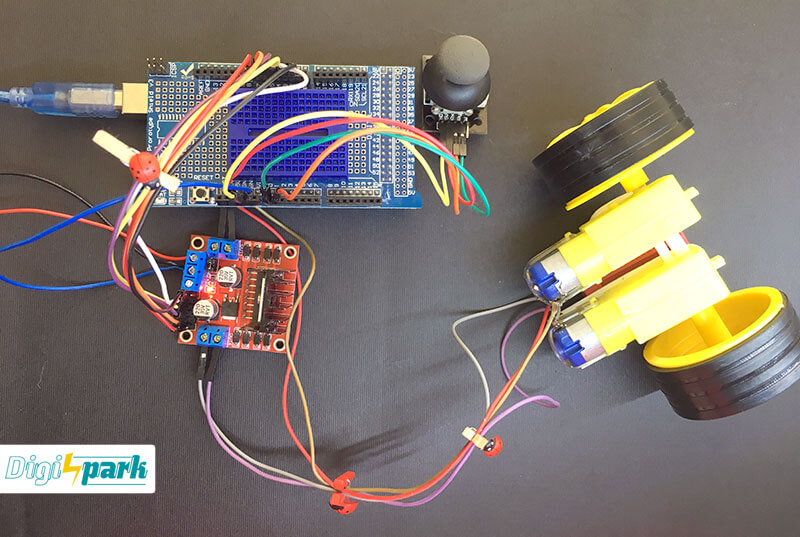
اجرای پروژه
در بخش سوم، توسط ماژول آنالوگ جوی استیک به دو موتور گیربکس دار فرمان میدهیم. با چرخش شافت جوی استیک به سمت راست، موتور راست حرکت خواهد کرد. با چرخش شافت جوی استیک به سمت چپ موتور سمت چپ حرکت خواهد کرد. با چرخش شافت به سمت بالا هر دو موتور به سمت جلو حرکت خواهند کرد و در نهایت با چرخش شافت جوی استیک به سمت پایین، هر دو موتور به سمت عقب حرکت خواهند کرد.
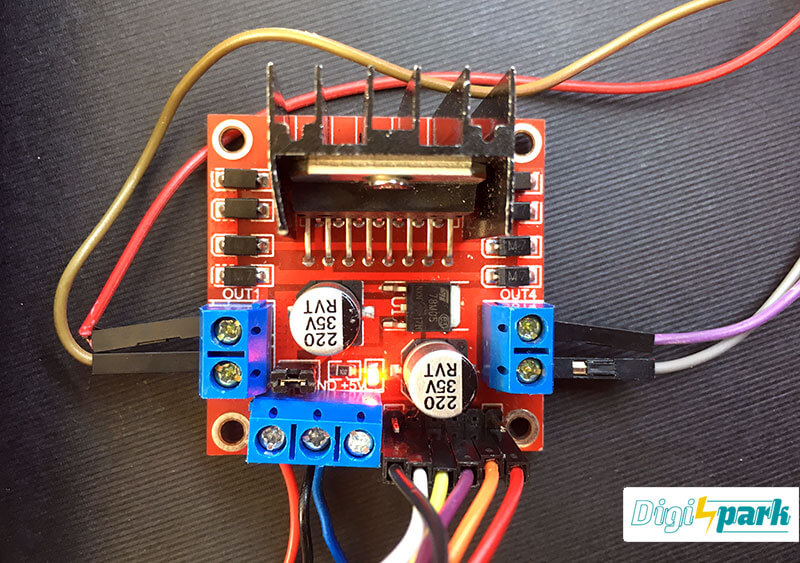
اتصالات درایور موتور L298
اتصال درایور موتور Driver Motor
- پایه ENA درایور موتور را به پایه ۲ دیجیتال آردوینو Arduino اتصال دهید.
- پایه IN1 درایور موتور را به پایه ۶ دیجیتال آردوینو Arduino اتصال دهید.
- پایه IN2 درایور موتور را به پایه ۵ دیجیتال آردوینو Arduino اتصال دهید.
- پایه IN3 درایور موتور را به پایه ۴ دیجیتال آردوینو Arduino اتصال دهید.
- پایه IN4 درایور موتور را به پایه ۳ دیجیتال آردوینو Arduino اتصال دهید.
- پایه ENB درایور موتور را به پایه ۷ دیجیتال آردوینو Arduino اتصال دهید.
اتصال موتور MOTOR DC
- هر دو موتور MOTOR را به خروجی های OUT1، OUT2، OUT3 و OUT4 اتصال دهید.
اتصال جوی استیک JoyStick
- پایه VRx ماژول جوی استیک را به پایه A1 آنالوگ آردوینو Arduino اتصال دهید.
- پایه VRy ماژول جوی استیک را به پایه A0 آنالوگ آردوینو Arduino اتصال دهید.
کد آردوینو کنترل موتور L298N
محدودیت در دسترسی کامل به این مجموعه آموزش
دسترسی کامل به آموزش برای اعضای دیجی اسپارک امکان پذیر است. بخش اصلی آموزش شامل سورس کدهای توسعه داده شده توسط مهندسهای دیجی اسپارک است. به همین دلیل این آموزش خاص و یکتاست. برای استفاده از آن بایستی عضویت تهیه کنید. تبادل نظر با کاربران و پرسش سوال رایگان است و میتوانید از بخش نظرات همین آموزش اقدام کنید. |
وسایل مورد نیاز
شیلد پروتوتایپ Arduino Mega2560
چنانچه در مراحل راه اندازی و انجام این پروژه با مشکل مواجه شدید، بدون هیچ نگرانی در انتهای همین پست، به صورت ثبت نظر سوالتان را مطرح کنید. من در سریعترین زمان ممکن پاسخ رفع مشکل شما را خواهم داد. همچنین اگر ایرادی در کدها و یا مراحل اجرایی وجود دارند میتوانید از همین طریق اطلاع رسانی کنید.
پروژه و دریافت بن ارسال رایگان
برای دریافت بن خرید از دانشجو کیت، کاربران بایستی با استفاده از وسایل این آموزش، پروژه را اجرا کرده و یا حتی مدار جدیدی تعریف کنید. سپس از اجرای کار فیلم گرفته و در شبکههای اجتماعی از جمله آپارات و اینستگرام، با هشتگهای دیجی_اسپارک و دانشجوکیت و digispark و daneshjookit منتشر کنند. سپس از طریق بخش نظرات در ادامه همین آموزش، جهت دریافت بن خرید ارسال رایگان به ارزش ۱۲۰۰۰ تومان از دانشجو کیت، لینک را زیر همین پست ارسال کنید.
در پایان نظرات و پیشنهادات خود را با ما درمیان بگذارید و با اشتراک گذاری این آموزش در شبکه های اجتماعی , از وبسایت دیجی اسپارک حمایت کنید.
سلام
واقعا در بخش درایور موتورها پیشتاز هستین و من با استفاده از آموزش های شما خرید کردم
سلام
از توجه شما ممنونم.
سلام ما با استفاده از L298n یک ماشین کنترلی ساختیم
https://aparat.com/v/9ydkP
کد تخفیف
با سلام
کاربر گرامی ضمن تشکر از شما، از طریق پرتال پشتیبانی فروشگاه جهت دریافت کد ارسال رایگان اقدام فرمایید.
ساخت ماشین کنترلی با L298N
https://aparat.com/v/9ydkP
کد تخفیف
با سلام
کاربر گرامی ضمن تشکر از شما، از طریق پرتال پشتیبانی فروشگاه جهت دریافت کد ارسال رایگان اقدام فرمایید.
من از دیتا بلوتوث استفاده میکنم و مخوام بدونم برای دنده عقب از چی استفاد کنم با دوتا موتور موتور اول HIGHباشه ودوم LOW یا برعکس
با سلام
سوال شما شفاف نیست. دقیق تر بفرمایید تا راهنمایی شود.
سلام و عرض خسته نباشید خدمت شما
ببخشید من یه سوال داشتم اینکه من با ماژول جوی استیک و دراور l298 و اردوینو uno ماشین کنترلی سیمی خواستم بسازم ولی وقتی اتصال دادم
موتور ها حرکت نمیکنن و فقط میلرزن
اتصال ها درسته ولی موتور ها همش در حال لرزش هستن
ولتاژ زیاد هم بهش دادم ولی اثری نداشت لطفا کمکم کنید
با سلام
جریان کافی در مدار وجود ندارد و سبب این مشکل شده است. تغذیه را بررسی نمایید.
میشه کد رو طوری تغییر داد که هر محور جویستیک برای یک متور باشه
مثلا چپ و راست برای موتور a
جلو عقب برای متور b
بسته به مقدار حرکت جویستیک سرعتم هم تغییر کنه
با سلام
بله در این خصوص از آموزش زیر ایده بگیرید.
جوی استیک
با سلام
من همه جا گشتم که همچین پروژه ای رو پیدا کنم اما فقط اینجا پیدا کردم و واقعا بهش نیاز دارم حتی خودم اردوینو بلد نیستم که کدش رو بنویسم لطفا لطفا
کدش رو بدین من چند روز اینترنت رو گشتم اما فقط اینجارو پیدا کردم
با سلام و تشکر از شما
بله اکثر آموزش های دیجی اسپارک به همین صورت هستند. سپاس از همراهی و پیگیری شما
با سلام و عرض خسته نباشید خدمت شما
پروژه کاربردی بود و حتی میشه تو ربات ها هم استفاده کرد ممنونم از آموزشتون
با سلام
سپاس از پیگیری و همراهی شما
سلام چتوری میتونم بصورت بیسیش کنم یعنی یک طرف فرستنده وطرف دیگر گیرنده
با سلام
بایستی در هر سمت یک ماژول فرستنده گیرنده قرار داده و بایک برد میکروکنترلر مجزا و کدهای مناسب را توسعه دهید.