
در این قسمت سلسله آموزش های ساخت کاردستی الکترونیکی، با رباتی متفاوت در خدمت شما هستیم. این ربات جذاب و در عین حال ساده ربات حرکتی ای است که با استفاده از سنسور تشخیص فاصله حرکت کرده و تغییر مسیر می دهد. نکته ی جذاب ربات فرمان بر با cd این است که بدون تماس مستقیم و فقط با اشاره میتوانید به ربات دستور حرکت بدهید، که به شما نزدیک شود یا از شما دور شود.برای ساخت این ربات کافیست دانش ابتدایی از الکترونیک و آشنایی با سنسور های مختلف را داشته باشد و در این صورت به راحتی قادر به ساخت آن خواهید بود. در ادامه ساخت ربات فرمان بر با cd و وسایل الکترونیکی ساده و چوب بستنی، با مرجع تخصصی کاردستی رباتیک به زبان فارسی، دیجی اسپارک همراه باشید.
لوازم مورد نیاز ساخت ربات فرمانبر
برای ساخت ربات فرمان بر با cd علاوه بر وسایل الکترونیکی به چندین قلم ابزار بازیافتی مثل سی دی،مفتول فلزی و… نیازمندیم.لیست ابزار الکترونیکی مورد نیاز به شرح زیر آمده است که با کلیک بر روی هر کدام از گزینه ها به صفحه ی محصول انتقال پیدا کرده و در صورت نیاز می توانید آن را از فروشگاه دانشجو کیت تهیه کنید.
- ترانزیستور NUD3105
- موتور DC (آرمیچر معمولی)
- باتری لیتیومی
- مولتی ترن ۱۰۰ کیلو یا پتانسومتر ۱۰۰ کیلو
- مقاومت ۱ کیلو اهم و مقاومت ۳۳۰ اهم
- سنسور فرستنده و گیرنده IR
دستور العمل ساخت ربات فرمانبر
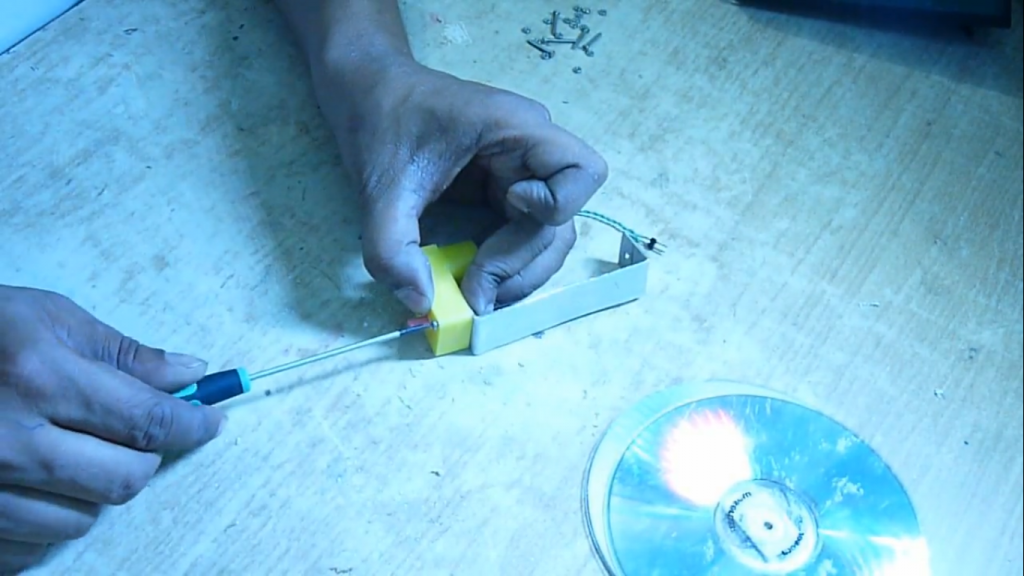
در قدم اول برای ساخت ربات فرمان بر با cd ما به دو عدد سی دی نیاز داریم.برای پوشش دادن حفره ی میانی سی دی ها از تکه های پلاستیک بازیافتی برش داده شده استفاده می کنیم.با استفاده از چسب دو قلو تکه های پلاستیکی را به سی دی ها متصل می کنیم.سپس نقطه ی مرکزی سی دی هارا پیدا کرده و بوسیله ی درفش یا هر وسیله ی تیز دیگری حفره ای ایجاد میکنیم.در این مرحله فاصله ی بین سر موتور دی سی و عرض آن را اندازه گیری میکنیم. سپس روی نوار آلومینیومی این فاصله را علامت زده و سپس مطابق ویدیو نوار را خمیده میکنیم.
در یک سمت نوار دو سوراخ ایجاد کرده و در سمت دیگر حفره ای در مرکز قسمت خمیده شده ایجاد میکنیم.سپس مطابق ویدیو شفت را به حفره های روی آلومینیوم پیچ میکنیم.سپس یکی از سی دی ها را برداشته و در قسمت حفره ی مرکزی پیج و مهره را به آن متصل میکنیم و سپس آن را به قسمت دیگر نوار آلومینیومی درست مانند ویدیو متصل میکنیم.این اتصال را محکم نمیکنیم تا سی دی بتواند آزادانه حرکت کند.سی دی دوم را نیز به شفت موتور دی سی متصل می کنیم.
ویدیو ساخت ربات فرمان با CD
مدار الکترونیکی
همانطور که در ابتدای آموزش ساخت ربات فرمان بر با cd گفته شد این ربات بدون تماس دست و از راه دور دست را تشخیص داده و در صورتی که فاصله دست از یک حد خاصی با ربات کمتر شود، ربات شروع به حرکت میکند. پس از تکمیل بخش مکانیکی ربات نیاز است که بخش مدار الکترونیکی روی ربات نصب شود. این ربات برای حرکت از یک موتور DC کوچک معمولی استفاده میکند. که در بازار با نام آرمیچر نیز شناخته میشود. زمانی که ولتاژ مناسبی به این موتور داده شود. موتور شروع به حرکت میکند، حرکت موتور باعث حرکت ربات دست ساز ما خواهد شد.

در مدار ربات فرمان بر با cd برای تشخیص فاصله بین ربات و دست، از سنسور مادون قرمز استفاده شده است. سنسور های مادون قرمز از دو بخش کاملا جدای فرستنده و گیرنده تشکیل شده است. این سنسور شباهت بسیار زیادی به LED دارد. و تنها تفاوت آن با LED این است که از خود نور مرئی ساطع نمی کند. فرستنده دارای کلاهک شیشه ای بوده و رنگی ندارد. اما گیرنده ها عموما به رنگ مشکی هستند و در برخی از موارد این گرینده ها با رنگ کلاهک آبی نیز در بازار موجود هستند. زمانی که ولتاژ مناسب به سنسور فرستنده مادون قرمز اعمال شود. نور فرابنفش را از خود ساطع میکند که با چشم غیر مسلح قابل دیدن نیست. از این سنسور بر روی کنترل تلویزون، کولر و … نیز استفاده میشود. اما برای تست میتوانید از دوربین موبایل خود استفاده کنید. زمانی که دوربین موبایل را بر روی فرستنده بگیرید. نور بنفشی را در صفحه مشاهده خواهید کرد (توجه داشته باشید که این قابلیت در گوشی های آیفون وجود ندارد و این نور از لنز دوربین گوشی های آیفون عبور نمیکند).

در ادامه نقشه مدار ربات فرمان بر با cd قرار داده شده است که میتواند فاصله را تشخیص داده و با توجه به میزان فاصله دست با ربات، ربات را به حرکت در آورد.
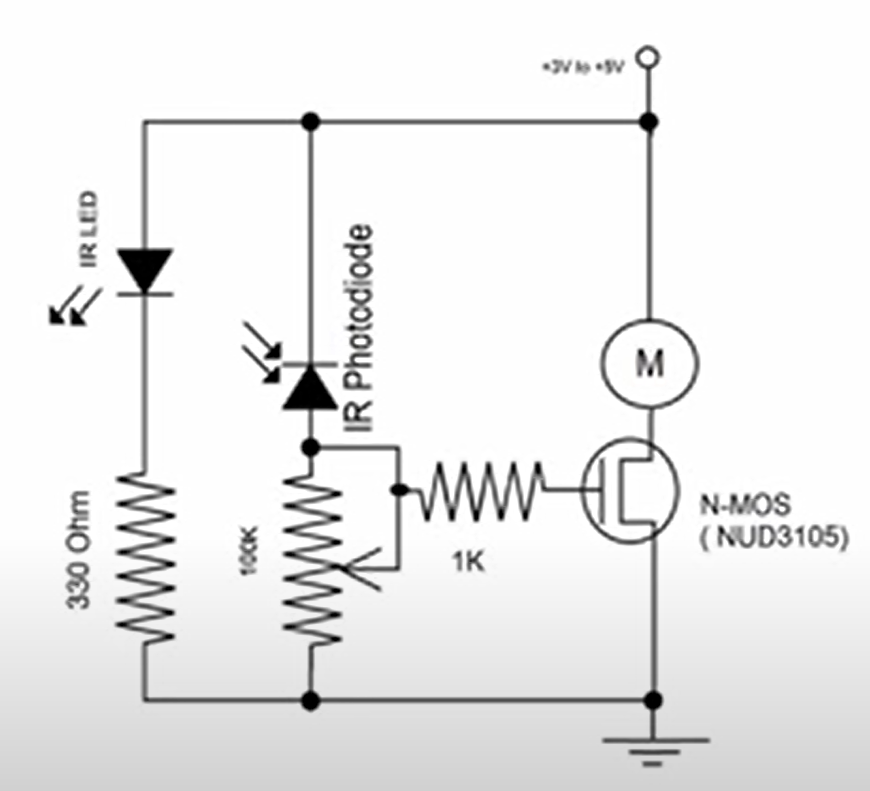
در این مدار سنسور فرستنده مادون قرمز همیشه روشن است. و زمانی که مانعی جلو سنسورها قرار بگیرد، نور سنسور فرستنده به سمت سنسور گیرنده بازتاب شده و ترانزیستور N-MOS موجود در مدار را روشن میکند. زمانی که این ترانزیستور روشن شود، دو سر موتور به منبع تغذیه یا همان باتری متصل شده و موتور روشن خواهد شد. میزان فاصله با توجه به مقدار مقاومت متغیر ۱۰۰ کیلو موجود بر روی پایه آند سنسور گیرنده مادون قرمز تعیین میشود. این مدار را میتوانید بر روی برد های هزار سوراخ پیاده کنید و از آن استفاده کنید.
نحوه اتصالات ربات فرمانبر
در مرحله ی اول ساخت ربات فرمان بر با cd مقوا رو به صورت دو مربع هم اندازه برش می دهیم و به قسمت حفره های سی دی میچسبانیم. سپس همانند تصویر دقیقا مرکز سی دی را با خط کش پیدا کرده و علامت می زنیم و دقیقا در همین نقطه حفره ایجاد می کنیم.

پس از اینکه دو قسمت مشخص شده ی موتور دی سی را اندازه گیری کردیم و به همان میزان نوار الومینیومی را خم کردیم،درست همانند تصویر زیر ورقه را به موتور دی سی توسط پیچ و مهره،متصل می کنیم.
بعد از اینکه مرکز سی دی هارا سوراخ کردیم با استفاده از پیچ و مهره آن ها را به موتور دی سی و ورقه ی آلومینومی متصل می کنیم.

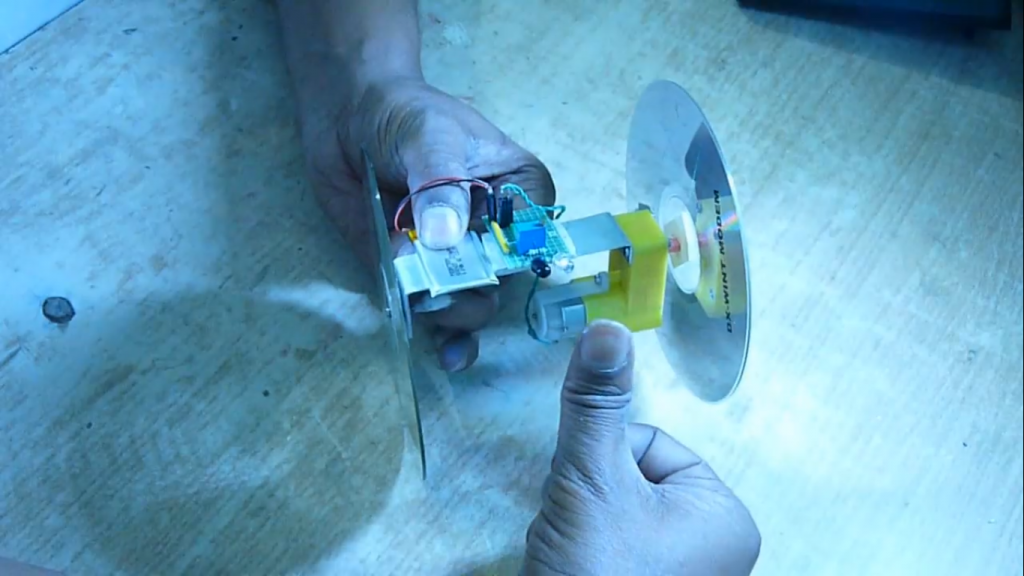
در این قسمت سنسور فرستنده گیرنده IR را همانند تصویر زیر به نوار آلومینیومی میچسبانیم. برای این اتصال می توانید از چسب حرارتی یا دوقلو استفادع کنید.سپس آن را به موتور گیربکس متصل می کنیم.

در مرحله ی آخر همانطور که در تصویر زیر مشاهده می کنید باتری لیتیوم در روی نوار آلومینیومی در کنار سنسور می چسبانیم.شما می توانید به جای باتری آلومینیومی از باتری قلمی نیز استفاده کنید.البته در نظر داشته باشید اگر تمایل به استفاده از باتری های قلمی دارید حتما جاباتری نیز تهیه کنید تا اتصالات شما با سهولت انجام گیرد.
در پایان چنانچه سوالی در خصوص ساخت این کاردستی ربات فرمانبر داشتید، از طریق بخش نظرات در ادامه این آموزش مطرح بفرمایید. من و همکارانم در تلاش هستیم تا پاسخ شما را در سریعترین زمان ممکن ارسال کنیم.
بسیار عالی. خسته نباشید
سلام. سپاس از همراهی شما
متوجه نشدم چرا از مولتی ترن استفاده شد
با سلام
برای تنظیم تشخیص فاصله به مولتی ترن نیاز دارید.