
پروتکل ارتباطی SPI برای ارتباط از دور بین دیوایس های مختلف با میکروکنترلرها کاربرد دارد. رزبری پای به واسطه برخورداری از GPIO از پروتکل ارتباطی SPI هم پشتیبانی میکند. در این آموزش به معرفی پروتکل ارتباطی SPI و راه اندازی در رزبری پای و نحوه ی برنامه نویسی با پایتون را یاد خواهیم گرفت. در ادامه راه اندازی SPI در رزبری پای با سری آموزش های پایتون با رزبری پای به زبان فارسی دیجی اسپارک همراه باشید.
پروتکل ارتباطی SPI
پروتکل ارتباطی SPI مخفف Serial Peripheral Interface در دهه ۱۹۸۰ میلادی معرفی شد! پروتکل ارتباطی SPI یک درگاه سریال ورودی و خروجی سنکرون (همزمان) با سرعت بالا است که اجازه میدهد داده ها به صورت سریال با طول قابل تنظیم (بین ۲ تا ۱۶ بیت) و همچنین سرعت انتقال قابل تنظیم به دستگاه وارد و خارج شود. در پروتکل SPI همانند پروتکل I2C، ارتباط بین دستگاه ها به صورت MASTER و SLAVE است. تفاوت عملکرد پروتکل ارتباطی در SPI این است که فقط یکی از دیوایس ها میتواند به عنوان MASTER با SLAVE ها ارتباط برقرار کند.
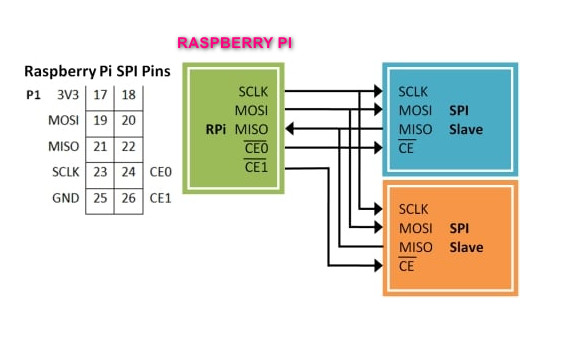
پایه های مورد نیاز برای ارتباط SPI به صورت زیر است:
- SCLK: سیگنالی تحت عنوان کلاک باعث همزمانی انتقال داده بین Master و Slave میشود. به ازای هر کلاک یک بیت داده منتقل میشود. این سیگنال بر روی خط SCLK تولید میشود. پس سرعت انتقال داده در SPI به فرکانس سیگنال کلاک تولید شده بر روی این پایه بستگی دارد. سیگنال کلاک از سمت Master تولید میشود.
- MOSI: در پروتکل SPI برای نوشتن داده روی Slave و خواندن داده از آن دو خط مجزا تعریف شده است. کلمه MOSI مخفف Master Output Slave Input است. Master با استفاده از این خط داده مورد نظر را به Slave انتقال میدهد.
- MISO: کلمه MISO مخفف Master Input Slave Output است. این خط برای برای انتقال داده از سمت Slave یه سمت Master از خط MOSI استفاده میشود.
- SS/CS: در حالت عادی زمانی که تنها یک Slave موجود است این خط بایستی داراری سطح ولتاژ پایین باشد. اما زمانی که تعداد Slave ها از یک عدد بیشتر شود. این خط برای انتخاب Slave مورد نظر مورد استفاده قرار میگیرد. به تعداد Slave ها های موجود بایستی از هر کدام از Slave ها یک خط SS به Master متصل شود. برای انتخاب Slave مورد نظر بایستی سطح ولتاژ خط مربوط به Slave مورد نظر را پایین و سطح ولتاژ باقی خطوط SS بالا باشد.
ماژول SPI در رزبری پای پیکو به شما امکان ارتباط با دیوایس های SPI را فراهم میکند. پروتکل ارتباطی SPI از معماری MASTER و SLAVE بهره برده و برای ارتباط به سه سیگنال و همان ارتباط سه سیمه نیاز داریم.
- SCLK : Serial Clock (output from master)
- MOSI : Master Output, Slave Input (output from master)
- MISO : Master Input, Slave Output (output from slave)
رزبری پای ۱ ۲ ۳ و رزبری پای زیرو دارای سه کنترلر SPI هستند که به ترتیب SPI0, SPI1, SPI2 است. در رزبری پای چهار و رزبری پای چهارصد و COMPUTE MODULE 4 دارای چهار باس SPI است.
SCLK - Serial CLocK CE - Chip Enable (often called Chip Select) MOSI - Master Out Slave In MISO - Master In Slave Out MOMI - Master Out Master In
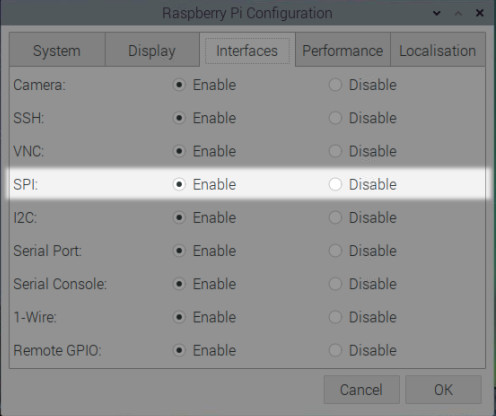
فعال کردن SPI در رزبری پای
از منو رزبری پای بر روی گزینه PREFERENCES را انتخاب کنید. سپس Raspberry pi Configuration را انتخاب کنید.
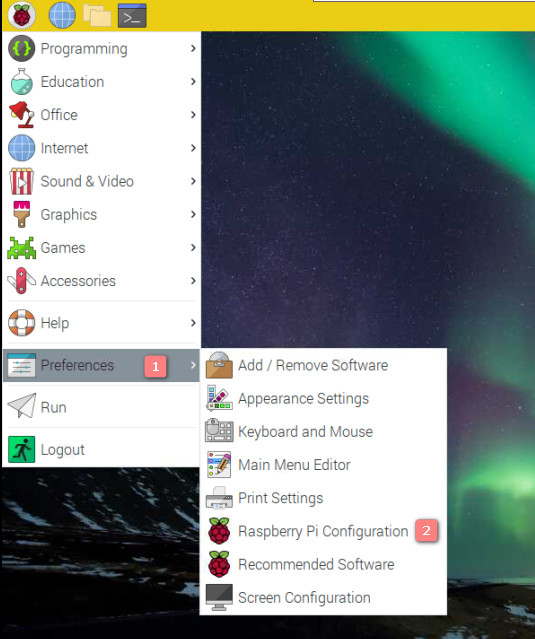
بر روی Interface کلیک کنید. سپس SPI را فعال Enable کنید.
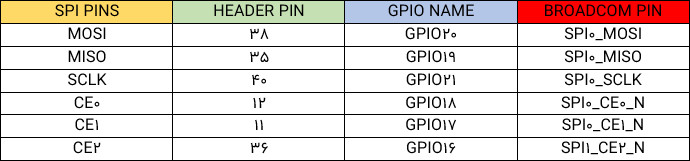
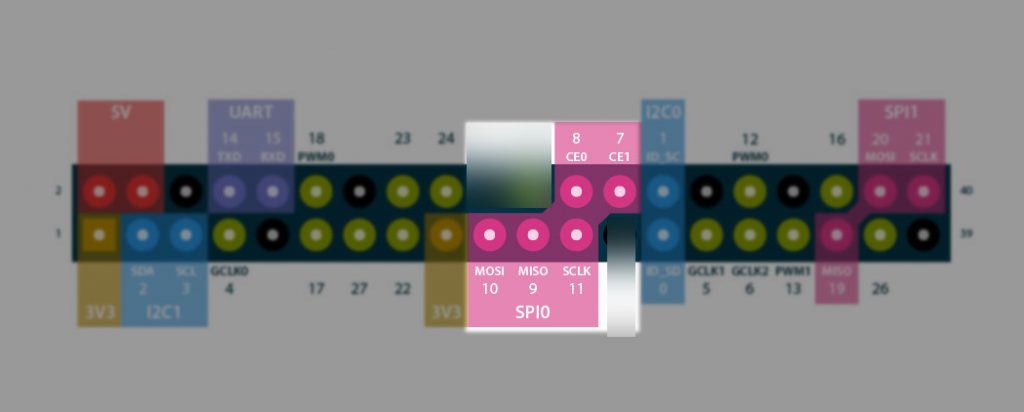
پایه های SPI در GPIO رزبری پای به صورت زیر است.

کتابخانه spidev
پروتکل ارتباطی SPI از SPIDEV پشتیبانی میکند. توسط این کتابخانه انواع دستگاه های SPI قابلیت اتصال به برد رزبری پای را دارد. هر دستگاهی که از پروتکل ارتباطی SPI پشتیبانی میکند میتواند به یکی از باس های SPI در برد رزبری پای متصل شود. نصب spidev
sudo apt-get update sudo apt-get upgrade sudo apt-get install python-dev python3-dev cd ~ git clone https://github.com/doceme/py-spidev.git cd py-spidev make sudo make install
کتابخانه SPIDEV
import spidev spi = spidev.SpiDev() spi.open(bus, device) to_send = [0x01, 0x02, 0x03] spi.xfer(to_send)
تنظمیات کتابخانه SPIDEV به صورت زیر است:
import spidev spi = spidev.SpiDev() spi.open(bus, device) # Settings (for example) spi.max_speed_hz = 5000 spi.mode = 0b01 ...
متدهای کتابخانه به صورت زیر است:
open(bus, device) توسط این متد به دیوایس های SPI کانکت میشود. opening /dev/spidev<bus>.<device
readbytes(n) برای خواندن N بایت از دیوایس SPI از این متد استفاده میشود.
writebytes(list of values) برای رایت مقادیر در دیوایس SPI از این متد استفاده میشود.
در ادامه یک نمونه کد برای راه اندازی یاس ۵ SPI نوشته شده است.
from spidev import SpiDev spi = SpiDev() spi.open(5,1) spi.max_speed_hz = 4000 msg = [0x01, 0x02, 0x03] spi.xfer(msg) answer = spi.readbytes(100) print(answer) spi.close()
جمع بندی لیدی پای
در بخش نهم از سری آموزش های پایتون با رزبری پای روش استفاده از پروتکل ارتباطی spi با رزبری پای و فعال کردن آن آموزش داده شده است. از ماژول ها و نمایشگرهایی که از رابط spi استفاده میکنند برای راه اندازی میتوانید استفاده کنید.
وسایل مورد نیاز
چنانچه در مراحل راه اندازی و انجام این پروژه با مشکل مواجه شدید، بدون هیچ نگرانی در انتهای همین پست، به صورت ثبت نظر سوالتان را مطرح کنید. من در سریعترین زمان ممکن پاسخ رفع مشکل شما را خواهم داد. همچنین اگر ایرادی در کدها و یا مراحل اجرایی وجود دارند میتوانید از همین طریق اطلاع رسانی کنید.
بابت انتشار پست های رزبری پای کمال تشکر را دارم چون هیچ سورسی واسش نبود
سپاس از همراهی شما کاربر گرامی
امیدوارم مفید واقع شده باشد.
سلام
آیا میشه کارت خوان rfid رو به رزبری پای وصل کرد؟
با سلام
بله قبلا در این خصوص آموزش منتشر شده است، بررسی کنید.
آموزش راه اندازی Rfid