
ربات های دست ساز لذت متفاوتی در ساخت دارند. در روند آموزش کودکان و ایجاد خلاقیت، استفاده از کاردستیهای ساده الکترونیکی، تاثیر زیادی خواهند داشت. روش های مختلفی برای ساخت کاردستی با موتور آرمیچر وجود دارد. در این آموزش ربات قدم زن با موتور آرمیچر گیربکس دار میسازیم. این موتور گیربکس پلاستیکی در پروژه های رباتیکی مختلفی قابل استفاده است. ممکن است هدف شما سرگرم کردن فرزندانتان یا نزدیکانتان باشد یا حتی علاقمند کردن آن ها به مبحث الکترونیک و رباتیک ! یا حتی کشف استعداد آن ها ! در طی آموزش های ساده و قابل اجرا به کمک وسیله های بازیافتی و وسایل الکترونیکی ساده در چند سطح مختلف از ساده به پیشرفته در دیجی اسپارک با ما همراه باشید. در ادامه ساخت این ربات کاردستی قدم زن با وسایل الکترونیکی و چوب آبسلانگ با مرجع تخصصی کاردستی رباتیک به زبان فارسی، دیجی اسپارک همراه باشید.
وسایل مورد نیاز ساخت ربات قدم زن
دستور العمل ساخت ربات قدم زن
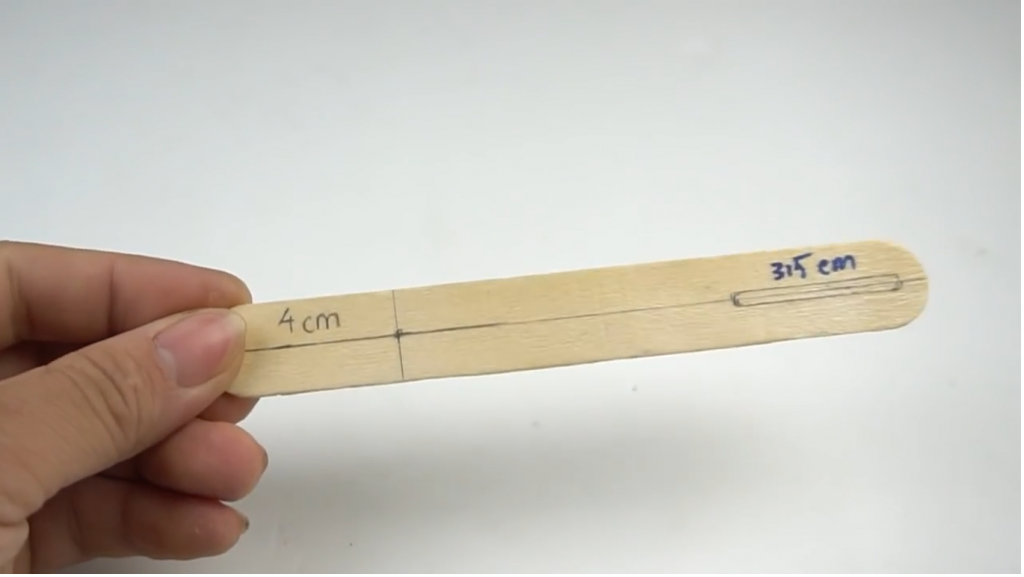
یک عدد چوب کباب تابه ای و یک عدد چوب آبسلانگ را در اختیار داشته باشید. در دو سمت چوب قرار است چند حفره ایجاد کنیم. از یک سمت به فاصله ۴ سانتی متر یک خط صاف ترسیم کنید و نقطه مرکزی آن را به کمک دریل یا هر وسیله ای که در دسترس دارید و توانایی ایجاد حفره را دارد ایجاد کنید. دقت داشته باشید به هنگام استفاده از دریل و در دست داشتن چوب آسیبی به خود نزنید. از سمت دیگر از نوک چوب آبسلانگ یه اندازه نیم سانتی متر فاصله بگیرید سپس دو حفره به فاصله ۳/۵ سانتی متر ایجاد کنید و حد فاصل آن دو حفره را به کمک کاتر برش دهید و از چوب آبسلانگ جدا کنید. دقت داشته باشید حفره های ایجاد شده کوچکتر یا بزرگتر از چوب کباب تابه ای نباشد. دو چوب بستنی را حاضر کنید یکی به ابعاد ۱۲ سانتی متر و دیگری را از هر دو طرف هلالی آن به اندازه ۳/۵ سانتی متر برش بزنید. چوب بستنی ۱۲ سانتی متری را بصورت خوابیده قرار دهید و دو چوب کوچک ۳/۵ سانتی متری را به دو طرف آن به کمک چسب متصل کنید. برای محکم تر شدن اتصالات، دو چوب کوچک دیگر به اندازه نیم سانتی متر یا ۱ سانتی متر برش دهید و به چوب ها متصل کنید.با این کار شما تعادل پاهای ربات را به هنگام حرکت برقرار میکنید. در ادامه برای درک بهتر اتصالات تمامی بخش های مهم را با تصویر پیش میرویم. چوب آبسلانگی که در مرحله اول شیار و حفره روی آن ایجاد کرده بودیم را دقیقا در نقطه مرکزی چوب ۱۲ سانتی متری با چسب متصل کنید. به همین صورت این کار را با چوب بعدی تکرار کنید. در این مرحله به شفت موتور گیربکس دار چوب آبسلانگ را به گونه ای طراحی میکنیم که چرخش دست های ربات ممکن شود. پس ۴ عدد چوب ۳ونیم سانتی متری از دو سر چوب آبسلانگ برش دهید و به فاصله نیم سانتی متری حفره ای به اندازه قطر چوب جوجه چینی که قرار است از حفره عبور کنید ایجاد کنید.
روی دو عدد از چوب ها را حفره ای مستطیلی به اندازه شفت موتور گیربکس ایجاد کنید. سپس یک چوب تک حفره ای و یک چوب دو حفره ای را با چسب به یکدیگر بچسبانید و چوب جوجه چینی را به اندازه ۳ سانتی متر عبور دهید. از سمتی که یک حفره قرار دارد هم اندازه با سطح چوب، آن را برش دهید. دو چوب را به دو شفت موتور گیربکس دار بصورت برعکس بدین صورت که یکی از چوب ها را به بالای موتور و دیگری رو به پایین موتور باشد متصل کنید. دو عدد چوب بستنی به اندازه ۱۰ونیم سانتی متر از یک سمت برش دهید و به بدنه ی موتور گیر بکس دار متصل کنید. حد فاصل دو چوب بستنی را اندازه بگیرید و به همان اندازه دو چوب برش دهید و در مرکز هر دو چوب حفره ای ایجاد کنید و به فاصله ۱ سانتی متریِ بالای چوب متصل کنید. در ادامه برای محکم نگه داشتن اتصالات میتوانید از چسب حرارتی بعنوان واشر استفاده کنید. پس چسب حراراتی را به دو قسمت نیم سانتی متری با کاتر یا قیچی برش دهید و با دریل در مرکز آن ها حفره ای ایجاد کنید. حالا نوبت به اتصال پاهای ربات به بدنه است . پاهای ربات را به شفت موتور گیربکس دار متصل کنید و چوب یک سانتی متری و واشر را به آن متصل کنید. به همین صورت دیگر پای ربات را متصل کنید. در ادامه محور های ربات را وصل میکنیم.
چوب جوجه چینی را در بالاترین قسمت ربات عبور دهید به هنگام عبور از هر حفره برای شکیل تر و محکم تر شدن اتصالات بایستی چوب یک سانتی متری و نی آبمیوه را از چوب جوجه چینی عبور دهید و در آخر واشر را به هر دو سمت چوب متصل کنید و اضافه های آن را با قیچی بچینید. برای تامین انرژی ربات سیم افشان را به پایه های جاباتری لحیم کنید . به پشت بدنه ربات متصل کنید. اتصالات باتری و کلید را مطابق تصویر انجام دهید و باتری را در جاباتری قرار دهید. برای دست های ربات مقوای ضخیم یا کارتن به شکل پله برش دهید و دو حفره اول و آخر آن برای اتصال به محور ربات ایجاد کنید. طراحی دست ربات میتوانید خلاقیت و سلیقه خودتان را دخالت دهید یا اینکه مطابق طرح کاردستی از آن الگو برداری کنید. برای حرکت دادن دست های ربات یک سیم به طول ده سانتی متر آماده کنید. یک سمت آن را به شکل دایره ای شکل دهید. و سمت دیگر را به حالت ۹۰ درجه خم کنید. و به حفره ی روی دست متصل کنید. برای طرح صورت ربات شما میتوانید الگو و طرح خودتان را پیاده سازی کنید و به بدنه متصل کنید.
ویدیو ساخت ربات قدم زن
نحوه ی اتصالات ربات قدم زن
در این مرحله شما تمامی اتصالات مهم را مرحله به مرحله مشاهده میکنید. دقت داشته باشید که در نهایت اتصالات صحیح است که منجر به حرکت کاردستی میشود. در این مرحله یک چوب آبسلانگ را با فاصله ها و انداره های مشخص شده آماده کنید و فاصله ی سه سانتی متری و نقطه ای که به فاصله چهار سانتی متر اندازه گیری کرده اید را با کاتر و دریل حفره ای ایجاد کنید.
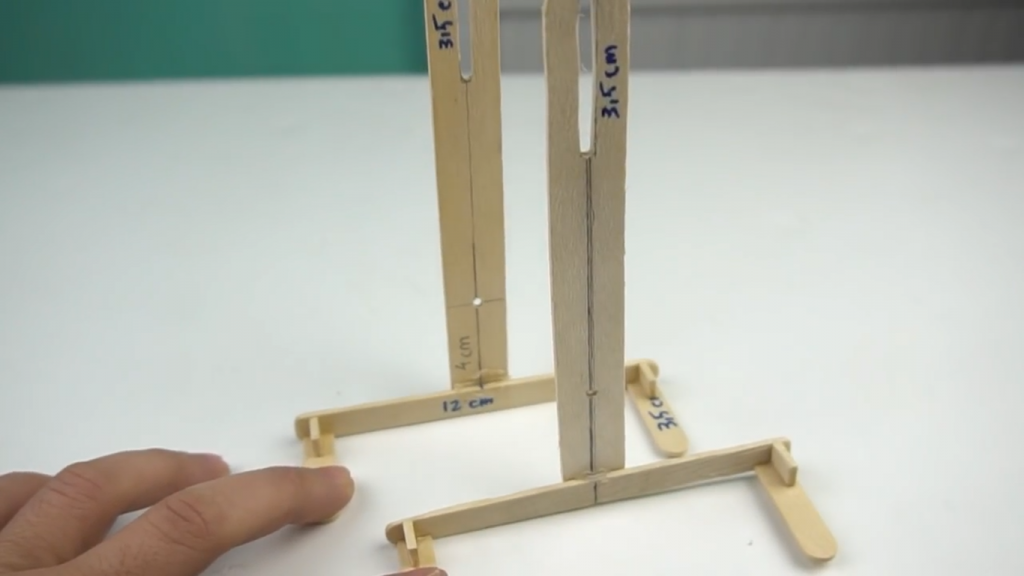
دو چوب بستنی را حاضر کنید یکی به ابعاد ۱۲ سانتی متر و دو چوب بستنی دیگر به ابعاد ۳/۵ و ۱ سانتی متر. از دو طرف هلالی چوب بستنی به اندازه ۳/۵ سانتی متر برش بزنید. چوب بستنی ۱۲ سانتی متری را مطابق تصویر قرار دهید و دو چوب کوچک ۳/۵ سانتی متری را به دو طرف آن به کمک چسب متصل کنید. برای محکم تر شدن اتصالات، دو چوب کوچک دیگر به اندازه نیم سانتی متر یا ۱ سانتی متر برش دهید و به چوب ها متصل کنید. این کار تعادل حرکت ربات را برقرار میکند.

پاهای ربات را بدین شکل متصل کنید.
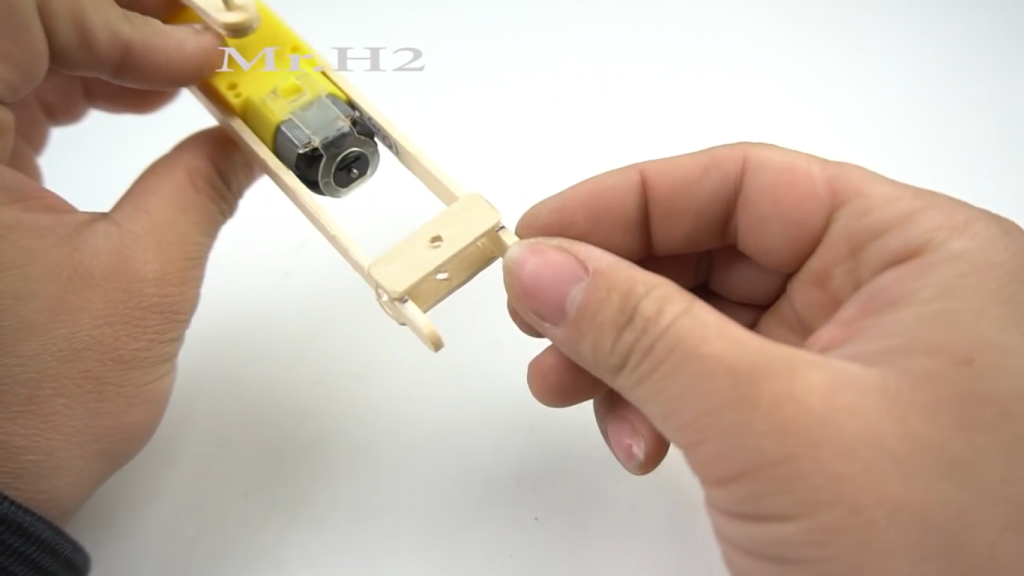
برای ساخت تبدیل شفت های چوبی بایستی ۲ عدد چوب ۳ونیم سانتی متری از دو سر چوب بستنی برش دهید و به فاصله نیم سانتی متری حفره ای به اندازه قطر چوب جوجه چینی که قرار است از حفره عبور کنید ایجاد کنید. روی دو عدد از چوب ها را حفره ای مستطیلی به اندازه شفت موتور گیربکس ایجاد کنید.دقت داشته باشید چوبی که روی آن قرار میگیرد تنها یک حفره دارد. چوب جوجه چینی ۳ سانتی متری را از حفره عبور دهید.
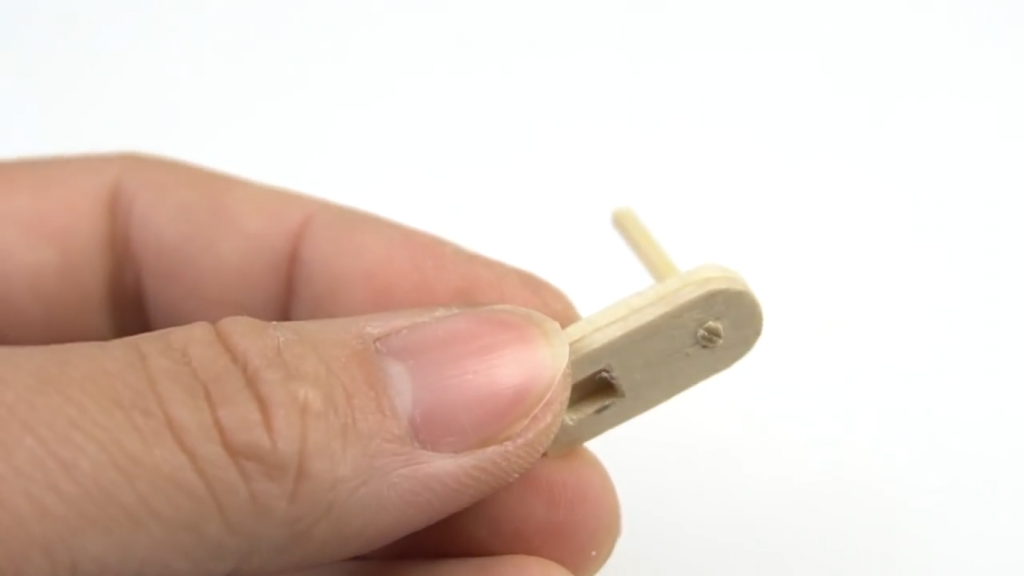
تبدیل های چوبی را به شفت موتور گیربکس دار متصل کنید.
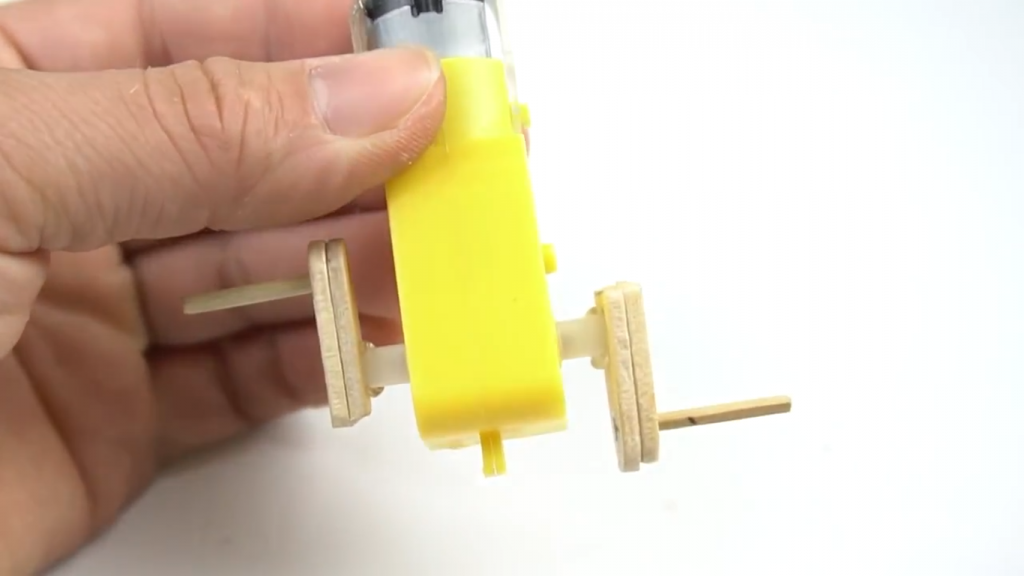
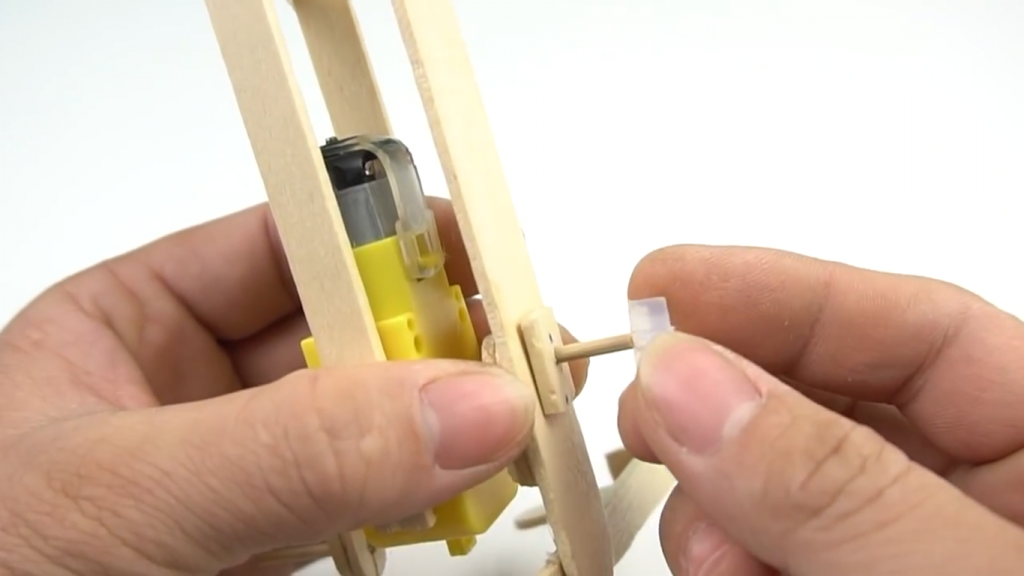
دو چوب بستنی ۱۰/۵ سانتی متری را به و طرف موتور گیربکس دار متصل کنید . حدفاصل آن ار اندازه گیری کنید و دو چوب را با حفره هایی که در مرکز آن ایجاد کرده اید را به فاصله نیم سانتی متر به آن همانند تصویر قرار دهید.
پایه های ربات را که از قبل آماده کردید را به تبدیل چوبی وصل کنید و واشر را برای محکم شدن اتصالات در نهایت قرار دهید. شما میتوانید از چسب حرارتی بعنوان واشر استفاده کنید.
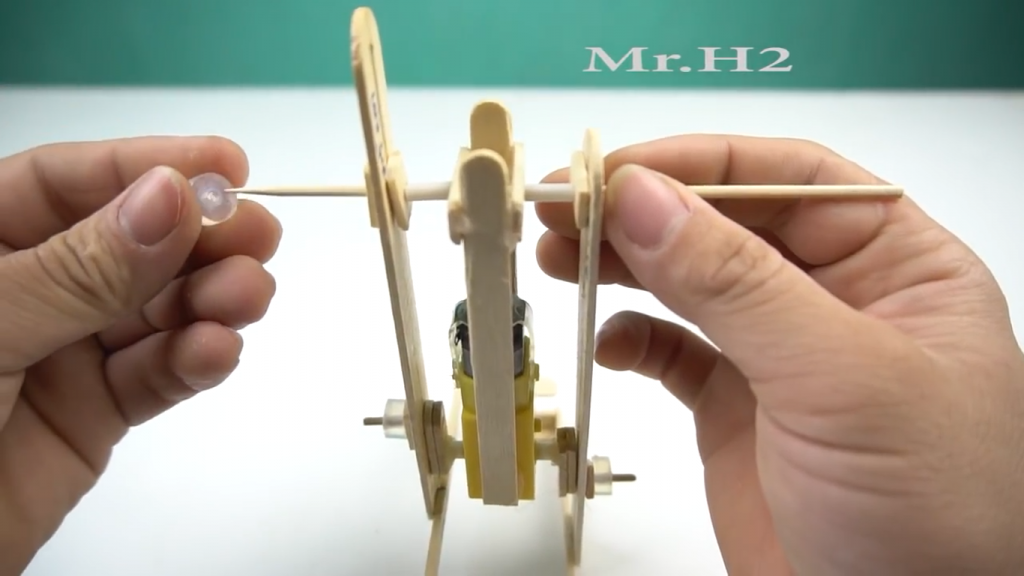
در این مرحله اتصالات محوری که حرکت دست های ربات را ممکن میکند را اجر میکنیم. در قسمت بالایی ربات در یک راستا همگی دارای یک حفره ی مرکزی هستند پس محورمان که یک چوب جوجه چینی است را از آن ها عبور میدهیم و در نهایت به کمک واشر کار های محکم های کاری اتصالات را انجام میدهیم. برش اضافه های چوب جوجه را فراموش نکنید!
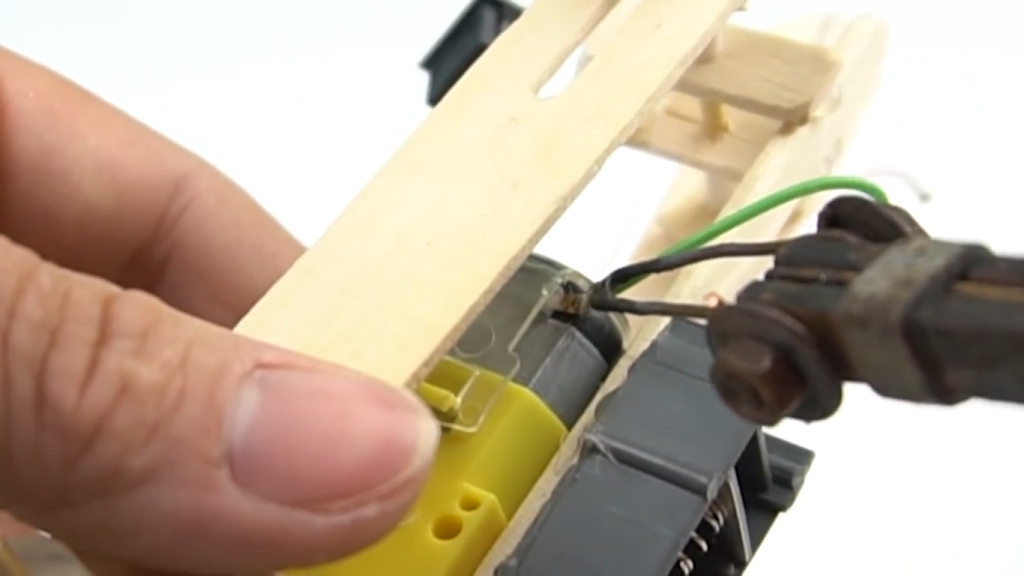
جاباتری و سیم افشانی که با چسب به آن وصل کردید را به موتور گیربکس دار متصل کنید.
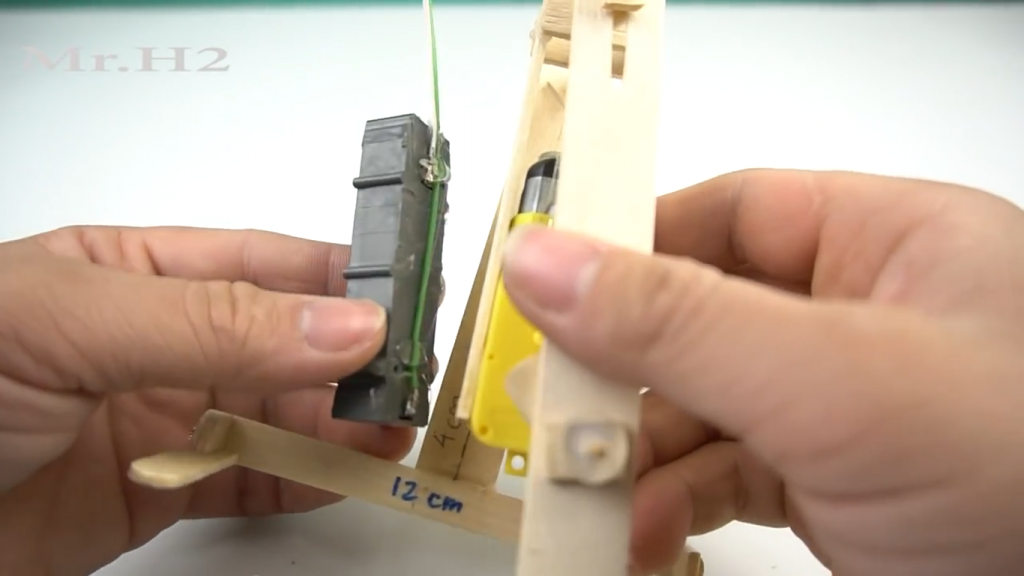
اتصالات باتری و کلید راکر و موتور را مطابق تصویر انجام دهید و باتری را در جاباتری قرار دهید.
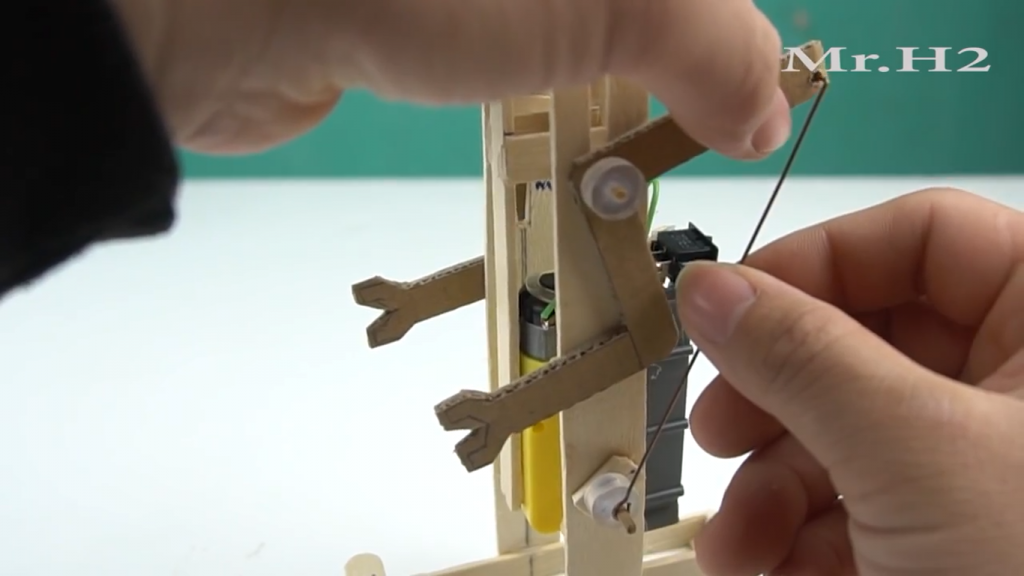
دو واشر بالایی را با دقت جدا کنید. دست ربات را به بدنه متصل کنید و دوباره واشر را در جای خود قرار دهید. به کمک یک سیم بازوی ربات را به تبدیل شفتی که در پایه های ربات قرار دارد متصل کنید.
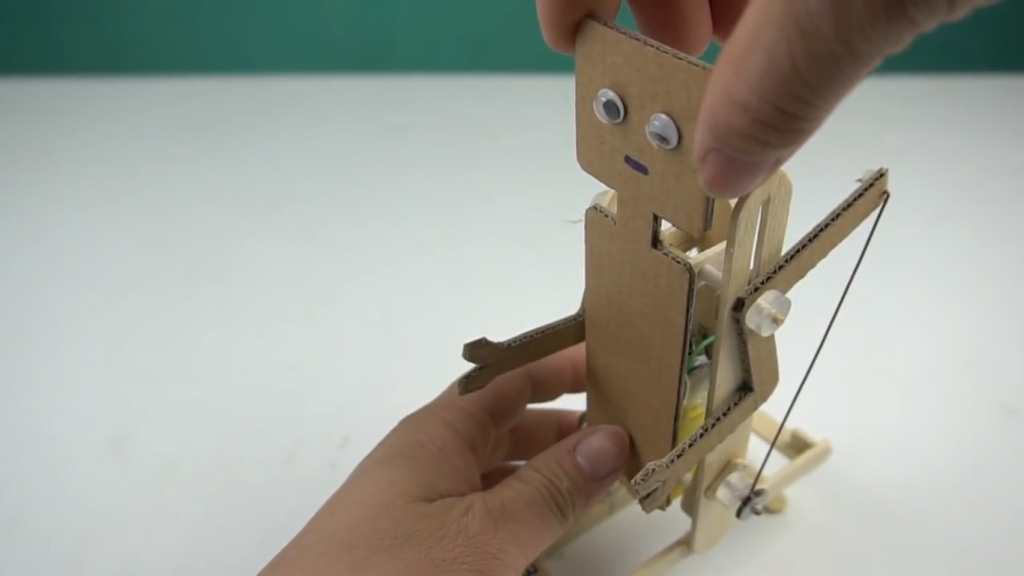
صورت و ظاهر ربات را میتوانید به سلیقه و طرح و رنگ دلخواه تان طراحی کنید یا طبق تصویر الگو برداری کنید.
در پایان چنانچه سوالی در خصوص ساخت این کاردستی ربات قدم زن داشتید، از طریق بخش نظرات در ادامه این آموزش مطرح بفرمایید. من و همکارانم در تلاش هستیم تا پاسخ شما را در سریعترین زمان ممکن ارسال کنیم.
سلام و وقت بخیر
طرح جالبی بود. برای پسرم چه موتوری تهیه کنم؟
باسلام
کاربر گرامی ضمن تشکر از همراهی شما، میتوانید از موتور گیربکس دار ۸۰ دور استفاده کنید. لطفا لینک زیر را بررسی کنید.
موتور گیربکس دار
سرگرم کننده و جالب خسته نباشید
باسلام
کاربر گرامی از همراهی شما سپاسگزاریم.