شاید پروژههای زیادی از ماژول MPU6050 دیده و یا تست کرده باشید. این ماژول نوعی شتاب سنج سه محوره است. کاربردهای مختلفی در صنایع دارد. البته ماژولهای مختلفی با این تراشه تولید شدهاند. هر کدام هم روش راه اندازی متفاوتی دارند. ولی در این آموزش یکی از محبوب ترین پروژههای MPU6050 یعنی teapot را به شما آموزش میدهیم. در نهایت یک مدل سه بعدی را به کمک این ماژول میتوانید کنترل کنید. در ادامه این آموزش با مرجع تخصصی آردوینو به زبان فارسی، دیجی اسپارک همراه باشید.
ماژول شتاب سنج MPU6050
حالا زمان این رسیده با سخت افزار اصلی این آموزش، یعنی MPU6050 بیشتر آشنا بشیم. Mpu6050 دارای یک شتاب سنج سه محوره و یک ژیروسکوپ سه محوره MEMS میباشد. دقت ماژول مبدل آنالوگ به دیجیتال ۱۲ بیت بوده و میتواند مقادیر X ، Y ، Z را در یک زمان اندازه گیری کند. بافر این ماژول از نوع FIFO با ظرفیت ۱۰۲۴ بایت میباشد. این ماژول به عنوان Slave به آردوینو توسط پایههای SCL و SDA متصل میشود. با استفاده از پردازشگر دیجیتال، ۴ خروجی برای دستیابی به دقت قابل توجه، در حرکتهای کند و سریع در سنسور فراهم کرده است. با این روش کاربر میتواند بازه اندازه گیری را متناسب با شتاب یا سرعت تغییر دهد. به همین منظور در قسمت ژیروسکوپ سنسور چهار بازه ۲۵۰±، ۵۰۰±، ۱۰۰۰± و ۲۰۰۰± درجه بر ثانیه و در قسمت شتاب سنج سنسور چهار بازه ۲g، ±۴g، ±۸g، ±۱۶g± برای کاربر قابل انتخاب خواهد بود. توجه داشته باشید که ولتاژ کاری این ماژول ۳ الی ۵ ولت میباشد.

نصب نرم افزار و کتابخانه مورد نیاز
نرم افزار Processing را می توان یک رابط گرافیکی معرفی کرد که دارای خروجی های ۲D , 3D , PDF می باشد و همچنین یک محیط OpenSource با صدها کتابخانه است. به تعریف ساده نرم افزار Processing، یک پلتفرم متن باز یا open source است که با استفاده از آن میتوانید یک محیط گرافیکی برای کد های خود در آردوینو ایجاد کنید که برای اولین بار در سال ۲۰۰۱ به بازار عرضه شد. برای آشنایی بیشتر با این نرم افزار می توانید به آموزش معرفی نرم افزار پروسسینگ Processing مراجعه کنید.
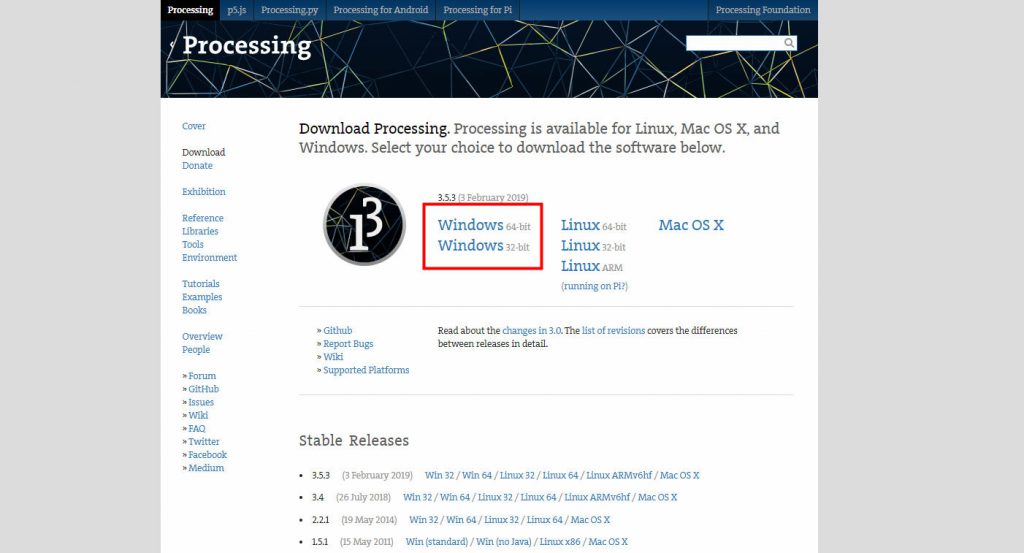
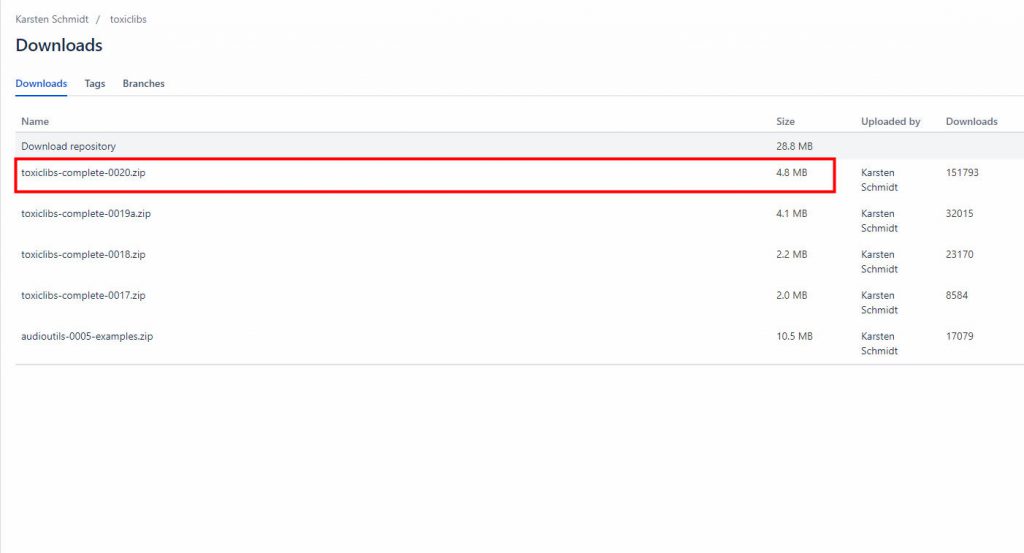
زبان برنامه نویسی این نرم افزار java و C++ می باشد. با استفاده از این لینک نرم افزار processing را دانلود نمایید. در ادامه به کتابخانه Toxiclibs برای نرم افزار processing نیاز خواهیم داشت ( دانلود کتابخانه Toxiclibs )
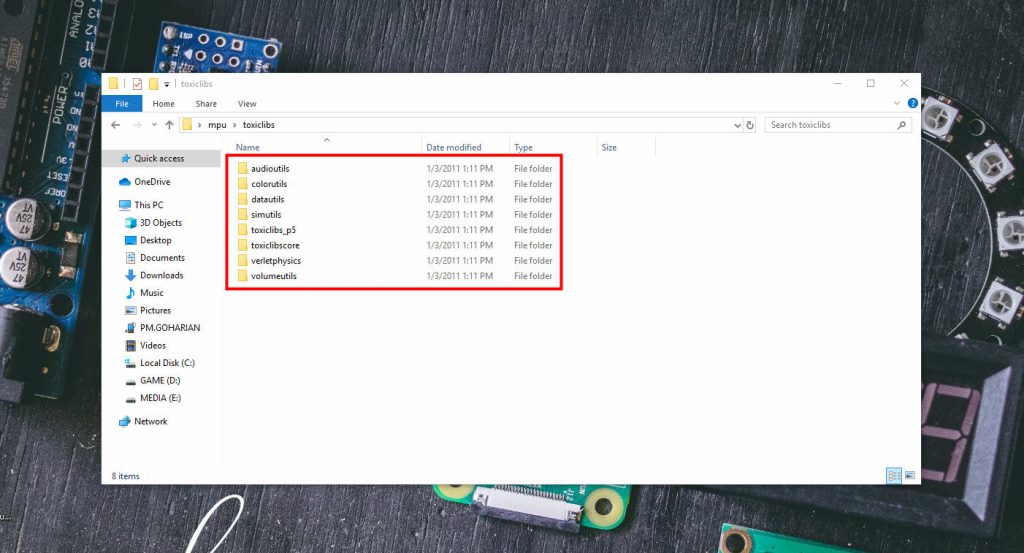
فایل های موجود در پوشه toxiclibs را به مکان زیر که در فولدر اصلی نرم افزار processing می باشد انتقال دهید. processing \ modes \ java \ libraries
سپس نیاز به کتابخانه مربوط به نرم افزار Arduino IDE می باشد که این کتابخانه را نیز می توانید از لینک روبرو دانلود نمایید. ( دانلود کتابخانه i2cdevlib )
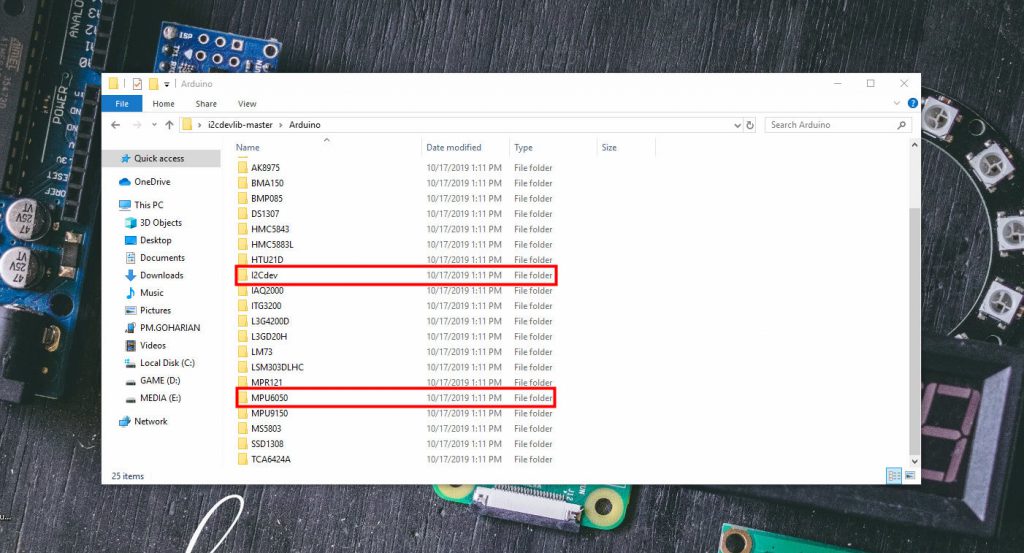
پس از دانلود این کتابخانه با چند فولدر با نام های مختلف مواجه خواهید شد که در پوشه Arduino باید دو فایل I2Cdev و mpu6050 را به مکان روبرو انتقال دهید. Documents \ Arduino \ libraries
راه اندازی MPU6050 و آپلود کدها
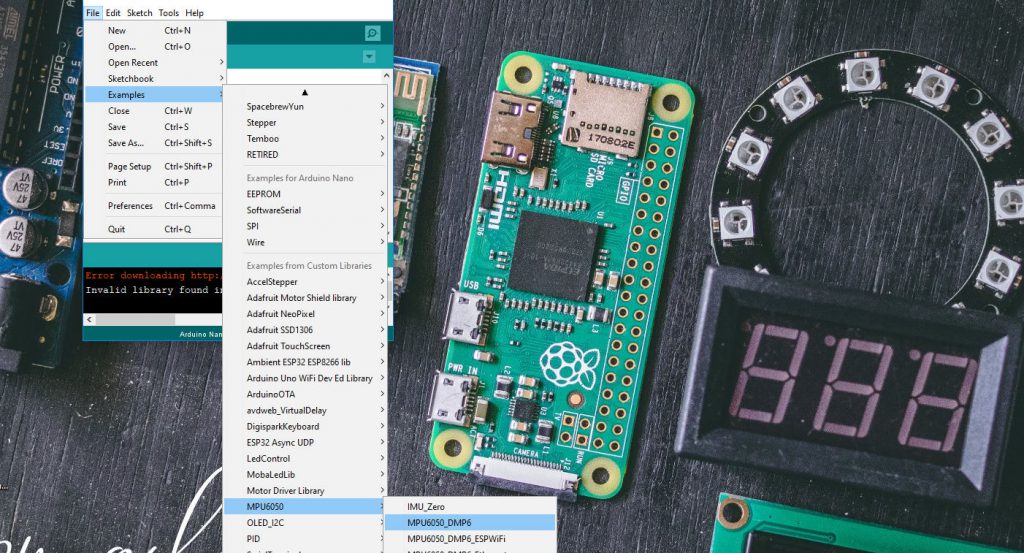
در ادامه با مراجعه به نرم افزار Arduino IDE منوی file / examples / MPU6050 و سپس انتخاب MPU6050-DMP6 به نمونه کد مورد نطر خواهیم رسید.
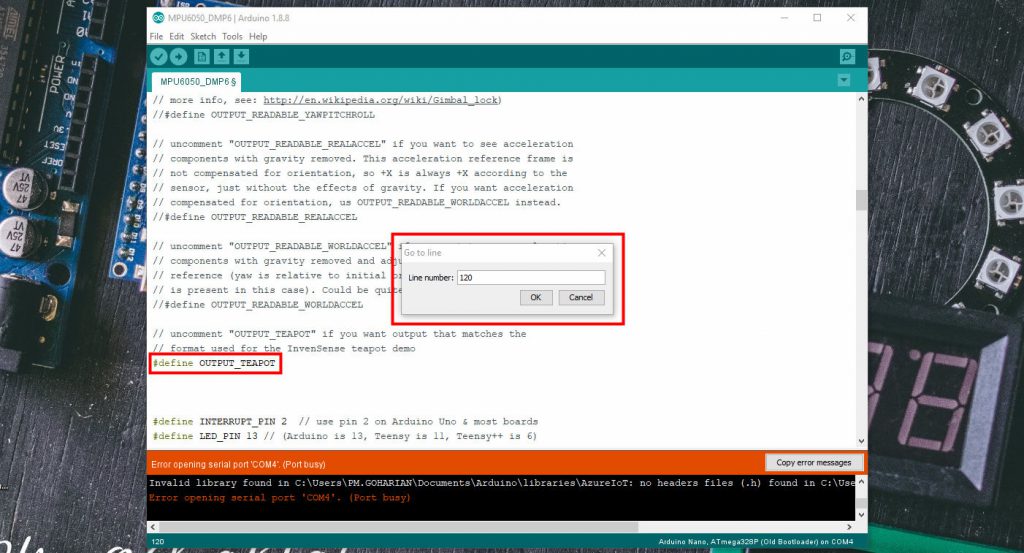
حال باید تغییراتی در این کد ایجاد کنیم با استفاده از Ctrl+L، پنجره ای برای جستجوی شماره خط کد خواهید دید، خط ۱۲۰ را جستحو کنید، مانند تصویر زیر کد مربوط به teapot را از اسلش خارج و دیگر کد ها را اسلش کنید سپس سورس کد را آپلود کنید.
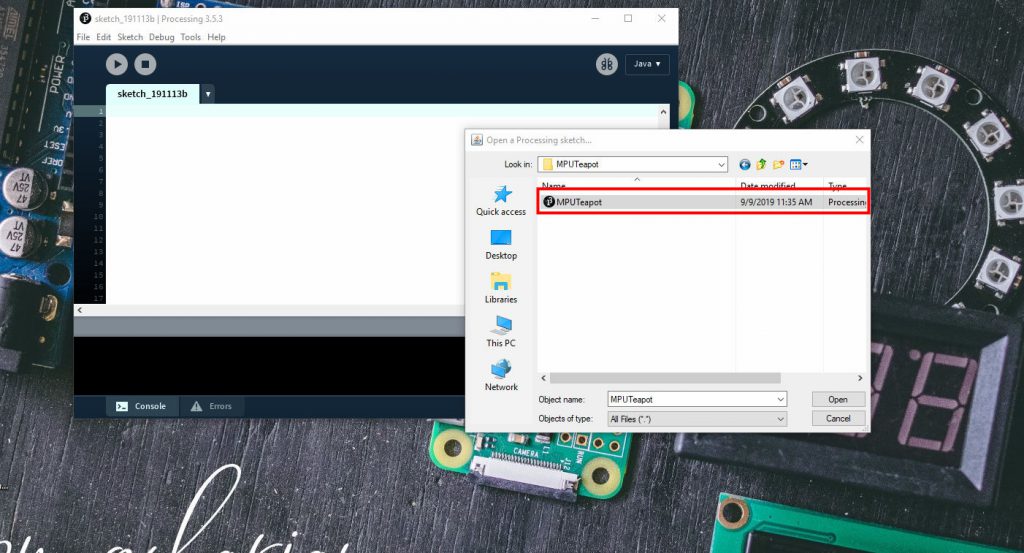
در ادامه نرم افزار processing را باز کرده و از طریق منوی file / open فایل مثال را از مکان زیر اجرا کنید.
Documents \ Arduino \ libraries \ MPU6050 \ examples \ MPU6050_DMP6 \ Processing \ MPUTeapot
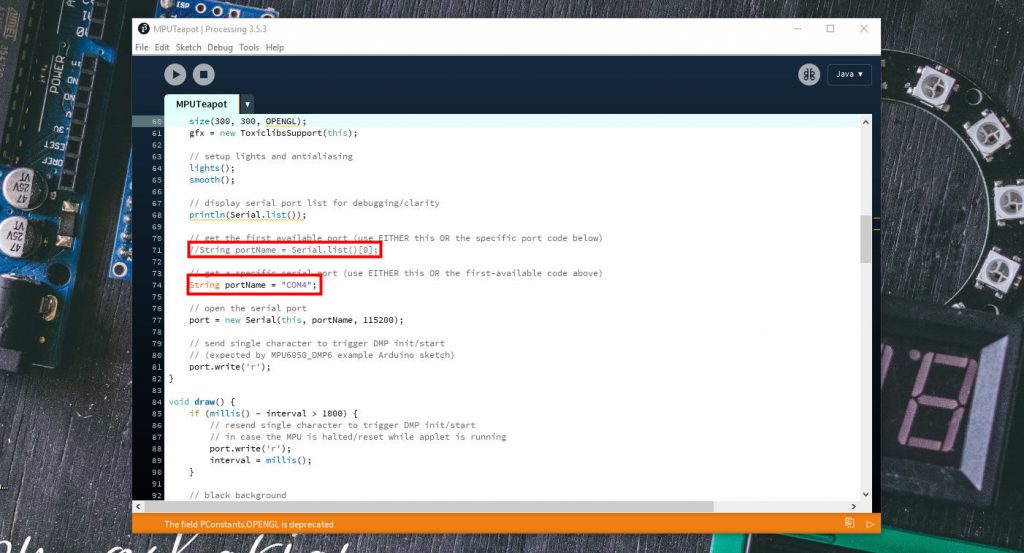
در کد نیاز به تغییراتی داریم که در ادامه به آن اشاره خواهیم کرد. در خط کد ۷۴ باید COM port مربوط به آردوینو را مشخص کنیم و همیچنین اسلش های موجود را حذف کرده و خط کد ۷۱ را اسلش کنیم.
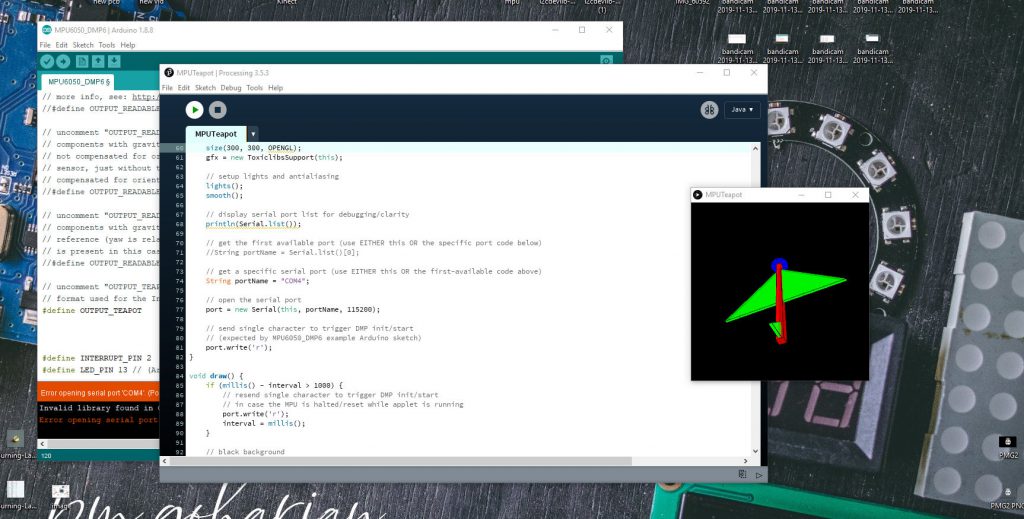
با اجرا کردن کد در نرم افزار Processing پنجره جدیدی برای شما باز خواهد شد که مدل ۳D در آن نمایش داده می شود. و با موقعیت ماژول در محور های x , y مدل سه بعدی نیز تغییر می کند.
” برای درک بهتر می توانید آموزش تصویری در یوتیوب را تماشا کنید “
اتصالات ماژول MPU6050 به آردوینو
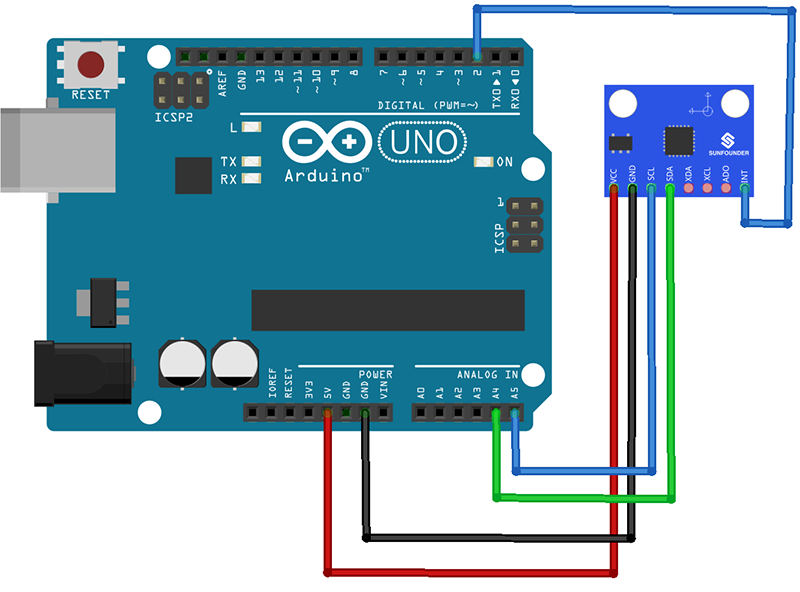
در این مرحله اتصالات را طبق تصویر زیر برقرار کنید، برای تغذیه کردن برد، پین VCC از ماژول را به پایه ۵v آردوینو متصل کنید. همچنین پایه GND ماژول را به GND آردوینو متصل کنید. ماژول MPU6050 دارای ۶ پایه دیگر میباشد. که SCL, SDA, XDA, XCL, ADD, INT نام دارند، در این پروژه برای دریافت مقادیر ماژول از پایههای SCL, SDA استفاده شده است. به ترتیب به پایههای A5 و A4 متصل میگردند و در ادامه INT به پایه D2 متصل میگردد. جهت درک بهتر به شماتیک زیر توجه کنید.
کد آردوینو ماژول MPU6050
در این کد با خواندن مقادیر محاسبه شده ماژول mpu6050 توسط آردوینو و سپس با برقراری ارتباط آردوینو و نرم افزار processing قادر به کنترل مدل ۳d خواهیم بود به این صورت که با آپلود کد آردوینو و سپس اجرای کد های نرم افزار processing با تغییر موقعیت ماژول در محور های x, y شاهد تغییر در مدل سه بعدی خواهیم بود. کدهای زیر را کپی کرده و به نرم افزار Arduino IDE منتقل کنید. چنانچه روش آپلود کدها روی آردوینو را نمیدانید به پست آموزش کار با برد آردوینو مراجعه کنید.
// I2Cdev and MPU6050 must be installed as libraries, or else the .cpp/.h files
// for both classes must be in the include path of your project
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
//#include "MPU6050.h" // not necessary if using MotionApps include file
// Arduino Wire library is required if I2Cdev I2CDEV_ARDUINO_WIRE implementation
// is used in I2Cdev.h
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
/* =========================================================================
NOTE: In addition to connection 3.3v, GND, SDA, and SCL, this sketch
depends on the MPU-6050's INT pin being connected to the Arduino's
external interrupt #0 pin. On the Arduino Uno and Mega 2560, this is
digital I/O pin 2.
* ========================================================================= */
/* =========================================================================
NOTE: Arduino v1.0.1 with the Leonardo board generates a compile error
when using Serial.write(buf, len). The Teapot output uses this method.
The solution requires a modification to the Arduino USBAPI.h file, which
is fortunately simple, but annoying. This will be fixed in the next IDE
release. For more info, see these links:
http://arduino.cc/forum/index.php/topic,109987.0.html
http://code.google.com/p/arduino/issues/detail?id=958
* ========================================================================= */
// uncomment "OUTPUT_READABLE_QUATERNION" if you want to see the actual
// quaternion components in a [w, x, y, z] format (not best for parsing
// on a remote host such as Processing or something though)
//#define OUTPUT_READABLE_QUATERNION
// uncomment "OUTPUT_READABLE_EULER" if you want to see Euler angles
// (in degrees) calculated from the quaternions coming from the FIFO.
// Note that Euler angles suffer from gimbal lock (for more info, see
// http://en.wikipedia.org/wiki/Gimbal_lock)
//#define OUTPUT_READABLE_EULER
// uncomment "OUTPUT_READABLE_YAWPITCHROLL" if you want to see the yaw/
// pitch/roll angles (in degrees) calculated from the quaternions coming
// from the FIFO. Note this also requires gravity vector calculations.
// Also note that yaw/pitch/roll angles suffer from gimbal lock (for
// more info, see: http://en.wikipedia.org/wiki/Gimbal_lock)
//#define OUTPUT_READABLE_YAWPITCHROLL
// uncomment "OUTPUT_READABLE_REALACCEL" if you want to see acceleration
// components with gravity removed. This acceleration reference frame is
// not compensated for orientation, so +X is always +X according to the
// sensor, just without the effects of gravity. If you want acceleration
// compensated for orientation, us OUTPUT_READABLE_WORLDACCEL instead.
//#define OUTPUT_READABLE_REALACCEL
// uncomment "OUTPUT_READABLE_WORLDACCEL" if you want to see acceleration
// components with gravity removed and adjusted for the world frame of
// reference (yaw is relative to initial orientation, since no magnetometer
// is present in this case). Could be quite handy in some cases.
//#define OUTPUT_READABLE_WORLDACCEL
// uncomment "OUTPUT_TEAPOT" if you want output that matches the
// format used for the InvenSense teapot demo
#define OUTPUT_TEAPOT
#define INTERRUPT_PIN 2 // use pin 2 on Arduino Uno & most boards
#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6)
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
// ================================================================
// === INTERRUPT DETECTION ROUTINE ===
// ================================================================
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
// ================================================================
// === INITIAL SETUP ===
// ================================================================
void setup() {
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
// initialize serial communication
// (۱۱۵۲۰۰ chosen because it is required for Teapot Demo output, but it's
// really up to you depending on your project)
Serial.begin(115200);
while (!Serial); // wait for Leonardo enumeration, others continue immediately
// NOTE: 8MHz or slower host processors, like the Teensy @ 3.3V or Arduino
// Pro Mini running at 3.3V, cannot handle this baud rate reliably due to
// the baud timing being too misaligned with processor ticks. You must use
// ۳۸۴۰۰ or slower in these cases, or use some kind of external separate
// crystal solution for the UART timer.
// initialize device
Serial.println(F("Initializing I2C devices..."));
mpu.initialize();
pinMode(INTERRUPT_PIN, INPUT);
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// wait for ready
Serial.println(F("\nSend any character to begin DMP programming and demo: "));
while (Serial.available() && Serial.read()); // empty buffer
while (!Serial.available()); // wait for data
while (Serial.available() && Serial.read()); // empty buffer again
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// Calibration Time: generate offsets and calibrate our MPU6050
mpu.CalibrateAccel(6);
mpu.CalibrateGyro(6);
mpu.PrintActiveOffsets();
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.print(F("Enabling interrupt detection (Arduino external interrupt "));
Serial.print(digitalPinToInterrupt(INTERRUPT_PIN));
Serial.println(F(")..."));
attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
// ERROR!
// ۱ = initial memory load failed
// ۲ = DMP configuration updates failed
// (if it's going to break, usually the code will be 1)
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
// configure LED for output
pinMode(LED_PIN, OUTPUT);
}
// ================================================================
// === MAIN PROGRAM LOOP ===
// ================================================================
void loop() {
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
if (mpuInterrupt && fifoCount < packetSize) {
// try to get out of the infinite loop
fifoCount = mpu.getFIFOCount();
}
// other program behavior stuff here
// .
// .
// .
// if you are really paranoid you can frequently test in between other
// stuff to see if mpuInterrupt is true, and if so, "break;" from the
// while() loop to immediately process the MPU data
// .
// .
// .
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
if(fifoCount < packetSize){
//Lets go back and wait for another interrupt. We shouldn't be here, we got an interrupt from another event
// This is blocking so don't do it while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
}
// check for overflow (this should never happen unless our code is too inefficient)
else if ((mpuIntStatus & _BV(MPU6050_INTERRUPT_FIFO_OFLOW_BIT)) || fifoCount >= 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// fifoCount = mpu.getFIFOCount(); // will be zero after reset no need to ask
Serial.println(F("FIFO overflow!"));
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & _BV(MPU6050_INTERRUPT_DMP_INT_BIT)) {
// read a packet from FIFO
while(fifoCount >= packetSize){ // Lets catch up to NOW, someone is using the dreaded delay()!
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
}
#ifdef OUTPUT_READABLE_QUATERNION
// display quaternion values in easy matrix form: w x y z
mpu.dmpGetQuaternion(&q, fifoBuffer);
Serial.print("quat\t");
Serial.print(q.w);
Serial.print("\t");
Serial.print(q.x);
Serial.print("\t");
Serial.print(q.y);
Serial.print("\t");
Serial.println(q.z);
#endif
#ifdef OUTPUT_READABLE_EULER
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetEuler(euler, &q);
Serial.print("euler\t");
Serial.print(euler[0] * 180/M_PI);
Serial.print("\t");
Serial.print(euler[1] * 180/M_PI);
Serial.print("\t");
Serial.println(euler[2] * 180/M_PI);
#endif
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print("ypr\t");
Serial.print(ypr[0] * 180/M_PI);
Serial.print("\t");
Serial.print(ypr[1] * 180/M_PI);
Serial.print("\t");
Serial.println(ypr[2] * 180/M_PI);
#endif
#ifdef OUTPUT_READABLE_REALACCEL
// display real acceleration, adjusted to remove gravity
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetAccel(&aa, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity);
Serial.print("areal\t");
Serial.print(aaReal.x);
Serial.print("\t");
Serial.print(aaReal.y);
Serial.print("\t");
Serial.println(aaReal.z);
#endif
#ifdef OUTPUT_READABLE_WORLDACCEL
// display initial world-frame acceleration, adjusted to remove gravity
// and rotated based on known orientation from quaternion
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetAccel(&aa, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity);
mpu.dmpGetLinearAccelInWorld(&aaWorld, &aaReal, &q);
Serial.print("aworld\t");
Serial.print(aaWorld.x);
Serial.print("\t");
Serial.print(aaWorld.y);
Serial.print("\t");
Serial.println(aaWorld.z);
#endif
#ifdef OUTPUT_TEAPOT
// display quaternion values in InvenSense Teapot demo format:
teapotPacket[2] = fifoBuffer[0];
teapotPacket[3] = fifoBuffer[1];
teapotPacket[4] = fifoBuffer[4];
teapotPacket[5] = fifoBuffer[5];
teapotPacket[6] = fifoBuffer[8];
teapotPacket[7] = fifoBuffer[9];
teapotPacket[8] = fifoBuffer[12];
teapotPacket[9] = fifoBuffer[13];
Serial.write(teapotPacket, 14);
teapotPacket[11]++; // packetCount, loops at 0xFF on purpose
#endif
// blink LED to indicate activity
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
}
}
چنانچه درباره کدها سوالی دارید از طریق بخش نظرات همین آموزش میتوانید مطرح کنید.
قطعات مورد نیاز
چنانچه در مراحل راه اندازی و انجام این پروژه با مشکل مواجه شدید، بدون هیچ نگرانی در انتهای همین پست، به صورت ثبت نظر سوالتان را مطرح کنید. من در سریعترین زمان ممکن پاسخ رفع مشکل شما را خواهم داد. همچنین اگر ایرادی در کدها و یا مراحل اجرایی وجود دارند میتوانید از همین طریق اطلاع رسانی کنید.
در پایان نظرات و پیشنهادات خود را با ما درمیان بگذارید و با اشتراک گذاری این آموزش در شبکه های اجتماعی , از وبسایت دیجی اسپارک حمایت کنید.
باسلام
آیا آی سی atmega328 آردوینو را میشود جدا از برد آردوینو با دستگاه پروگرامر ،و با خود نرم افزار آردوینو پرو گرام کرد؟
با سلام
بله این امکان وجود دارد، ابتدا با استفاده از برد آردوینو ابتدا کامپایلر مربوط بر روی ای سی خام آپلود شده و سپس کد مربوط آپلود می شود.
سلام
آیا میشود پروژه های آردینو را بدون برد آردینو (مثلا برد UNO) وفقط با IC atmega328 اجرا کرد؟
البته با استفاده درست از پایه های ic وتغذیه مناسب؟
آیا نبود کریستال ۱۶مگاهرتز،مشکلی در راه اندازی IC ایجاد نمیکند؟
لطفا راهنمایی بفرمایید
باتشکر
با سلام
بله این امکان وجود دارد، ابتدا با استفاده از برد آردوینو ابتدا کامپایلر مربوط بر روی ای سی خام آپلود شده و سپس کد مربوط آپلود می شود.
برای آپلود کد ها کریستال و همچنین دو عدد خازن عدسی در مدار الزامی می باشد.
سلام. خوب هستید.
من برای یک پروژه نیاز به سنسور جایرو واسه حفظ تعادل سه محوره دارم (تقریبا مثل کوادکوپتر)
مطالب زیادی در موردش خوندم ولی خب چون از الکترونیک چیز زیادی نمی دونم بیشتر گیج میشم.
البته کلا از این آردونیو خیلی خوشم اومده ولی برنامه نویسی و نصبش رو تا خودم با یک استاد تجربه نکنم، هیچی نمی فهمم.
می تونم خواهش کنم بعد از راه اندازی دوباره ورکشاپ ها، یه ورکشاپ در این زمینه هم بزارین؟ (یعنی با محوریت نصب جایرو و شتاب سنج)
چون فکر می کنم اغلب کسانی که کارهای کوادکوپتر انجام میدن از این استقبال کنند.
ممنونم
با سلام، خیلی ممنون
لطفا در این مورد از طریق بخش تیکت های سایت دانشجوکیت اقدام بفرمایید.
سلام
هنگام آپلود کد با خطای ?’Quaterninon’ does not name a type ;did you mean ‘union’
روبرو میشم
با سلام، کد رو تست کردم مشکلی در زمان آپلود نبود، امکان داره مشکل از کتابخانه های استفاده شده باشد یا تغییراتی در کد داده باشید.
سلام وقت بخیر
چطور میشه با سنسور mpu9250 و با استفاده از سنسورفیوژن سه متغیر yaw رو بصورت پایدار بدست آورد؟
با سلام
این مورد توسط بنده تست نشده است.از دیگر کاربرانی که در این خصوص اطلاعاتی دارند، تقاضا میکنم در بحث شرکت کنند.