برد nRF24L01 ماژولی برای انتقال داده به صورت بی سیم میباشد. در مواردی مانند:هدست های بی سیم ، کنسول های بازی مانند ps3 ، اتوماسین خانگی، سیستمهای مسیریاب مانند GPS و… استفاده میشود. این ماژول در نوع آنتن دار و بدون آنتن ارایه میشود که برد آنتن دار ۱۱۰۰ متر و بدون آنتن آن ۱۰۰ متر است. ماژول NRF یک ماژول بسیار عالی برای ارسال و دریافت اطلاعات بدون خطا است. ماژول NRF در مقابسه با ماژولهای HMTR از امکانات بسیار بیشتری برخورد دار می باشند. در ادامه این آموزش با مرجع تخصصی آردوینو به زبان فارسی، دیجی اسپارک همراه باشید.
توضیحات ماژول NRF24L01
ماژول NRF24L01 یک ماژول بیسیم رادیویی است که توسط شرکت Nordic Semiconductor تولید میشود. این ماژول از پروتکل ارتباطی نیمهدوپلکس SPI (Serial Peripheral Interface) برای ارتباط با میکروکنترلرها یا میکروپروسسورها استفاده میکند و ارتباط بیسیم در فرکانس ۲٫۴ گیگاهرتز را پشتیبانی میکند. NRF24L01 قابلیت ارسال و دریافت دادهها را با سرعتهای مختلف فراهم میکند و به راحتی میتواند در برنامههای مختلف از جمله رباتیک، اینترنت اشیاء (IoT)، کنترل از راه دور و تجهیزات حسگری استفاده شود.
- فرکانس عملیاتی: ماژول از فرکانس ۲٫۴ گیگاهرتز استفاده میکند که برای بسیاری از برنامهها بسیار مناسب است.
- پروتکل ارتباطی: این ماژول از پروتکل اختصاصی خود که برای انتقال دادهها بهینهسازی شده است استفاده میکند. اما کتابخانهها و نرمافزارهایی برای اتصال با میکروکنترلرها ارائه شده است که این پروتکل را پشتیبانی میکنند.
- قدرت خروجی: این ماژول از سیستم آنتن داخلی بهره میبرد که باعث میشود قدرت خروجی آن برای برنامههای کوچک و متوسط مناسب باشد. اما در صورت نیاز به دامنه بیشتر میتوان از ماژولهای با آنتن خارجی استفاده کرد.
- سرعت انتقال داده: این ماژول قابلیت ارسال و دریافت دادهها با سرعتهای مختلف را داراست. سرعت انتقال داده بسته به نیاز برنامه قابل تنظیم است.
- ولتاژ کاری: ولتاژ کاری ماژول از ۱٫۹ ولت تا ۳٫۶ ولت میباشد که امکان اتصال به منابع تغذیه مختلف را فراهم میکند.
- مصرف انرژی پایین: NRF24L01 با مصرف انرژی کم عمل میکند که برای کاربردهایی که از منابع تغذیه با محدودیت استفاده میکنند، بسیار مناسب است.
- امنیت: این ماژول دارای روشهایی برای افزایش امنیت ارتباطات است که از جمله کدگذاری و تأیید دریافت دادهها میتوان به آنها اشاره کرد.
مشخصات فنی NRF24L01
مشخصات فنی ماژول NRF24L01 به طور خلاصه عبارتند از:
- فرکانس عملیاتی: ۲٫۴ گیگاهرتز.
- ولتاژ کاری: از ۱٫۹ ولت تا ۳٫۶ ولت.
- جریان مصرفی: حداکثر ۱۳٫۵ میلیآمپر در حالت فعال و کاری، ۹۰۰ نانوآمپر در حالت انتظار.
- مصرف برق در حالت خواب: کمتر از ۲۶ میکروآمپر.
- قدرت خروجی: قابل تنظیم از ۰dBm تا ۱۸dBm.
- پروتکل ارتباطی: پروتکل خاصی از نوع SPI با امکان اتصال به میکروکنترلرها و میکروپروسسورهای مختلف.
- نرخ انتقال داده: قابل تنظیم از ۲۵۰ کیلوبیت بر ثانیه تا ۲ مگابیت بر ثانیه.
- آنتن: دارای آنتن داخلی با دامنه مناسب برای برنامههای کوچک و متوسط. همچنین، ورژنهایی از این ماژول با آنتن خارجی نیز موجود است.
- پروتکل: این ماژول دارای پینهای SPI برای اتصال به میکروکنترلر و پینهای دیگری برای تنظیم پارامترها و کنترل.
- قابلیت امنیتی: این ماژول از رمزگذاری هاردویری و CRC (Cyclic Redundancy Check) برای بررسی صحت دادهها استفاده میکند.
- برد انتقال: برد ارتباطی در فضای آزاد تا ۱۰۰ متر برای شرایط دید مستقیم و تا ۳۰ متر برای شرایط دیواره و موانع میتواند باشد.
- ابعاد: ابعاد کوچک و جمعوجور با وزن کم که برای کاربردهای مختلف مناسب است.
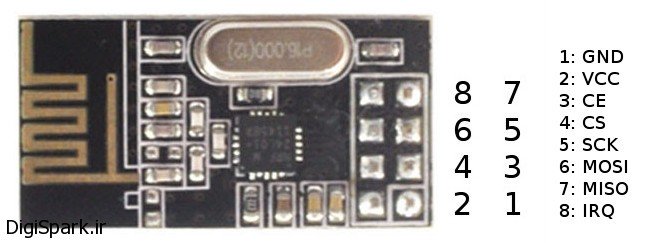
بررسی پایه های NRF24L01
ماژول NRF24L01 دارای ۸ پایه (پین) است که هر کدام وظیفههای خاص خود را دارند. در زیر پایههای NRF24L01 به همراه توضیح کوتاهی برای هرکدام آمده است:
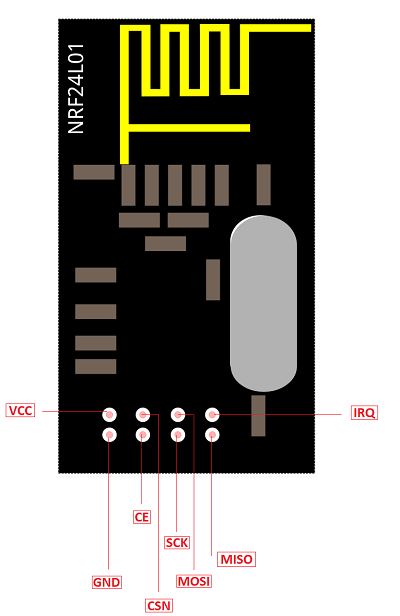
- VCC: منبع تغذیه ماژول (۱٫۹ تا ۳٫۶ ولت). اتصال این پین به منبع تغذیه برق با ولتاژ مناسب الزامی است.
- GND: زمین یا سر کارآمد برای اتصال به زمین مدار.
- CE (Chip Enable): این پین برای فعال کردن و غیرفعال کردن ماژول به کار میرود. وقتی این پین به حالت فعالیت (HIGH) درآید، ماژول آمادهٔ انتقال و دریافت داده میشود.
- CSN (Chip Select Not): این پین برای انتخاب ماژول در ارتباط SPI استفاده میشود. وقتی این پین به حالت LOW درآید، ماژول آمادهٔ برقراری ارتباط SPI میشود.
- SCK (Serial Clock): این پین کلاک سریال برای ارتباط SPI است.
- MOSI (Master Output Slave Input): این پین برای ارتباط دادههای ارسالی از میکروکنترلر به ماژول در ارتباط SPI است.
- MISO (Master Input Slave Output): این پین برای ارتباط دادههای دریافتی از ماژول به میکروکنترلر در ارتباط SPI است.
- IRQ: این پین برای اطلاعرسانی به میکروکنترلر در مورد وقوع رویدادهای مختلف مانند دریافت داده جدید، خطاها و موارد مشابه استفاده میشود.
هدف آموزش: کنترل سرو موتور با جوی استیک توسط NRF24L01
سخت افزار مورد نیاز برای کنترل سرو موتور با جوی استیک به کمک برد nRF24L01 دو عدد Arduino در این پروژه از یک عدد آردوینو mega2560 و یک عدد آردوینو uno استفاده شده است.
دو عدد ماژول NRF24L01
دو عدد خازن ۱۰ میکروفاراد برای اتصال به تغذیه ماژول nRF24L01
اتصال ماژول NRF24L01 به آردوینو
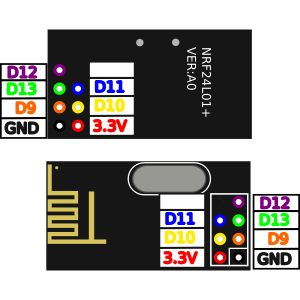
در تصویر زیر نحوه ی اتصال پین ها را مشاهده میکنید. پین VCC به ۳٫۳ ولت و GND به GND متصل شود. دقت داشته باشید که اتصالات پایههای ماژول NRF را درست انجام داده باشید.
پینهای CE و CSN ماژول NRF میتوانند به هر پین دیجیتالی منصل شوند. در برد آردوینو uno پینهای پرروتوکل spi به صورت زیر است.
- MOSI is connected to the digital pin 11
- MISO is connected to the digital pin 12
- SCK is connected to the digital pin 13
در برد آردوینو mega2560 پینهای پروتکل spi به صورت زیر است.
- MOSI is connected to the digital pin 51
- MISO is connected to the digital pin 50
- SCK is connected to the digital pin 52
ابتدا کتابخانه را از این لینک دانلود کنید و به نرم افزار اضافه کنید.
کد آردوینو فرستنده ماژول NRF
محدودیت در دسترسی کامل به این مجموعه آموزش
دسترسی کامل به آموزش برای اعضای دیجی اسپارک امکان پذیر است. بخش اصلی آموزش شامل سورس کدهای توسعه داده شده توسط مهندسهای دیجی اسپارک است. به همین دلیل این آموزش خاص و یکتاست. برای استفاده از آن بایستی عضویت تهیه کنید. تبادل نظر با کاربران و پرسش سوال رایگان است و میتوانید از بخش نظرات همین آموزش اقدام کنید. |
تحلیل کد آردوینو NRF24L01
در ابتدای برنامه آردوینو NRF ابتدا سه کتابخانه SPI.h ,nrf24L01.h,RF24.h را فراخوانی میکنیم. از کلاس RF24 یک شی به نام radio میسازیم.
RF24 radio(8,53);
این شی دو آرگمان ورودی دارد. که آرگومان اول CE و آرگومان دوم CSN است. قابل ذکر است که میتوانید پین های دیگری از برد آردوینو را استفاده کنید.
const byte rxAddr[6] = "00001";
سپس یک آرایه به نام rxAddr تعریف میکنیم.در این آرایه آدرس گیرنده که قرار است اطلاعات برایش ارسال شود قرار میگیرد. در تابع setup برای شروع کار با مودم از دستور زیر استفاده میکنیم.این دستور باعث فعال شدن ماژول می شود.
radio.begin()
سپس از دستور ;(radio.setRetries(15, 15 استفاده میکنیم. در این ماژول با هر بار ارسال داده به فرستنده به گیرنده ، گیرنده یک ack ایجاد میکند.حال با استفاده از تابع بالا ، در صورتی که این ack توسط فرستنده دریافت نشد ، فرستنده سعی به ارسال دوباره ی داده میکند. به زبان ساده تر ، اگر اطلاعات توسط گیرنده دریافت نشود ، فرستنده داده ها را دوباره ارسال خواهد کرد. در آرگومان اول عدد مورد نظر در ۲۵۰ میکرو ثانیه ضرب میشود (حداکثر مقدار برای آرگومان ۱۵ می باشد)و زمان تغییر در هر بار ارسال داده را مشخص میکند. بنابر این در مثال ما اگر گیرنده موفق به دریافت داده ای نشد ، فرستنده هر۳۷۵۰ میکرو ثانیه یا هر ۳٫۷۵ میلی ثانیه (۱۵*۲۵۰=۳۷۵۰) سعی به ارسال داده میکند. آرگمان دوم تعداد دفعات سعی برای ارسال داده را مشخص میکند.در این مثال اگر ماژول گیرنده داده ای دریافت نکرد ، ماژول فرستنده قبل از متوقف شدن ۱۵ بار برای ارسال مجدد داده تلاش میکند.
radio.openWritingPipe(rxAddr);
این متد ماژول را در مد فرستنده قرار میدهد و در ورودی آن آدرس گیرنده اطلاعات را وارد میکنیم.
joyStick[0]=analogRead(A0); joyStick[0]=map(joyStick[0],0,1023,0,180); radio.write(joyStick, sizeof(joyStick));
ابتدا مقدار آنالوگ جوی استیک که بین ۰ و ۱۰۲۳ می باشد در خانه ی صفرم آرایه joystick قرار میگیرد، سپس به کمک تابع map مقدار ۰ الی ۱۰۲۳ به مقدار ۰الی ۱۸۰ نسبت داده میشود. متد write داری دو ورودی می باشد که ورودی اول مقداری است که ارسال خواهد شد و ورودی دوم اندازه ی مقدار ارسالی می باشد که به کمک تابع sizeof به طور اتوماتیک اندازه ی آن را مشخص میکنیم.
کد آردوینو گیرنده ماژول NRF24L01
کدهای زیر را روی آردوینو آپلود کنید. این بخش از کدها مربوط به ماژول NRF در وضعیت گیرنده است.
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
RF24 radio(7, 8);
Servo servo;
const byte rxAddr[6] = "00001";
void setup()
{
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0, rxAddr);
radio.startListening();
servo.attach(3);
}
void loop()
{
if (radio.available())
{
int joyStick[2];
radio.read(joyStick, sizeof(joyStick));
servo.write(joyStick[0]);
}
}
کد های گیرنده تقربیا مشابه کد های فرستنده می باشد فقط در چند تابع دارای اختلاف جزئی می باشد که به توضیح هر کدام میپردازیم.
radio.openReadingPipe(1, rxAddr);
آرگمان اول تعداد فرستتنده هایی است که گیرنده از آن ها اطلاعات در یافت میکند. قابل ذکر است از ۶ فرستنده به طور همزمان میتوان اطلاعات دریافت نمود. آرگمان دوم آدرس فرستنده اطلاعات می باشد.
radio.startListening();
این متد ماژول را برای دریافت اطلاعات آماده میکند.
radio.available()
اگر ماژول داده ای دریافت نمود ، این متد مقدار true و اگر مقداری دریافت نکرد مقدار false را بر میگرداند. پس از دریافت داده، مقدار مورد نظر به سروو موتور نسبت داده می شود.
جمع بندی
NRF24L01 یک ماژول بیسیم رادیویی با قابلیتهای منحصربهفرد است که توسط شرکت Nordic Semiconductor تولید میشود. این ماژول از فرکانس ۲٫۴ گیگاهرتز استفاده میکند و از پروتکل ارتباطی SPI برای اتصال به میکروکنترلرها و میکروپروسسورها استفاده میکند. از جمله ویژگیهای مهم NRF24L01 میتوان به مصرف انرژی پایین، دارا بودن آنتن داخلی، امنیت بالا، قابلیت ارسال و دریافت دادهها با سرعت بالا، و پشتیبانی از برد ارتباطی مناسب اشاره کرد. این ماژول به عنوان راهکاری ایدهآل برای اتصال بیسیم دستگاهها در کوتاه مدت و در فواصل نسبتاً کم استفاده میشود. برای مثال، میتوان از این ماژول برای ارتباط بین کنترلر و ربات، دستگاههای حسگری و کنترل از راه دور استفاده کرد.با توجه به مصرف انرژی پایین و قابلیتهای بیسیم، ماژول NRF24L01 میتواند به عنوان یک حلقه ارتباطی در شبکههای اینترنت اشیاء استفاده شود. مثلاً میتوان از این ماژول برای اتصال حسگاهها و دستگاههای مختلف در خانه هوشمند، کنترل تجهیزات خانگی و غیره استفاده کرد.
چنانچه در مراحل راه اندازی و انجام این پروژه با مشکل مواجه شدید، بدون هیچ نگرانی در انتهای همین پست، به صورت ثبت نظر سوالتان را مطرح کنید. من در سریعترین زمان ممکن پاسخ رفع مشکل شما را خواهم داد. همچنین اگر ایرادی در کدها و یا مراحل اجرایی وجود دارند میتوانید از همین طریق اطلاع رسانی کنید.
در پایان نظرات و پیشنهادات خود را با ما درمیان بگذارید و با اشتراک گذاری این آموزش در شبکه های اجتماعی , از وبسایت دیجی اسپارک حمایت کنید.
خیلی جامع بود ممنون
با سلام و خسته نباشید خدمت شما بسیار عالی و خوب و به زبان ساده برای درک بهتر افراد بود بسیار از اموزش خوبتون ممنونم
سلام
من این ماژول را از توی جمهوری خریدم، ولی اینی که من دارم، کریستال روش نیست، البته یکی هستا ولی خیلی ریزه گفتم نکنه ماژولم فرق داره با این آموزش؟
لطفا کمک کنید.
سلام
اگه ماژول بدون آنتن باشه کریستالش بزرگه و اگر هم آنتن داشته باشه ، کریستالش کوچیکه
تفاوتی در راه اندازی ندارن
موفق باشید
خواهش میکنم کمکم کنین پروژه رو نیاز دارم
سلام
اول باید یه تشکر بکنم از این آموزشهای روان و خوبتون
یه نکته هم هست فکر کنم توی توضیح کدهای فرستنده radio.available() را اشتباه نوشتین باید radio.begin(); رو مینوشتین
تو کد های فرستنده که از radio.available اصلا استفاده نشده ۱!
داخل کد اصلی نه ، در قسمت توضیحات
سلام
ممنون از توجهتون
اصلاح میشه
سلام
عکس های این مطلب حذف شده اند.
سلام اصلاح میشه ممنون
سلام و خسته نباشین به خاطر زحماتتون
بنده میخاستم به سیله این ماژول صدا را انتقال بدم ولی هر چی در وب گشتم چیز به درد بخوری پیدا نردم. شما میدونین این کار را چجوری باید انجام بدم؟
با تشکر
سلام
امکانش هست ولی یکم مشکله. الان اکثرا تو راه اندازی همین ماژول مشکل دارن چه برسه به انتقال صدا.
ولی من بررسی کردم میشد انجامش داد. در لیست آموزش ها قرارش میدم
سلام با تشکر از زحماتتون امکانش هست از دوتا آردوینوی uno استفاده بشه ؟میشه یکم توضیح بدین؟ ممنون
سلام بله.شما از هر مدل آردوینویی که دارین میتونین استفاده کنین .همونطور ک در آموزش هم گفته شده این ماژول بر اساس پروتکل spi کار میکند و فقط کافی است این ارتباط را بین ماژول و آردوینو برقرار کنید
سوالی بود در خدمتم
ممنون از اینکه پاسخ دادین
یک سوال دیگه ازتون دارم
اگر نخوایم اطلاعات خاصی رو ارسال و دریافت کنیم یعنی نوع اطلاعاتی که قراره بفرستیم هرچیزی بتونه باشه مثل متن…عکس… یا حتی فیلم ..امکانش هست؟
من هر پروژه ای که تو این زمینه دیدم توش دقیقا داره یه کاره خاصی انجام میشه مثلا اینجا کنترل سروو موتور یا پروژه ی دیگه که گذاشته بودین خاموش روشن شدن ال ای دی یا پروژه های دیگه اما سواله من اینه که اگر بخوایم بسته ی اطلاعاتی که میتونه هرچیزی باشه رو ارسال کنیم این امکان وجود داره؟ چطوری باید توی کد بهش بگم packet رو ارسال و دریافت کنه؟
خیلی ممنون میشم راهنمایی بفرمایین
سلام
ارسال و دریافت صدا رو میدونم ک میشه انجام داد
فکر کنم تصویر و فایل رو هم بتونین
تاحالا راجبش مطالعه ای نداشتم
[…] […]
آقا خیلی خیلی خیلی ممنون….
سلام ببخشید دیتا شیت فارسی nrf رو اگه ممکنه برای دانلود بذارید.چون توضیحاته دستورات توابعی که توی کتابخانه ش هست به زبانه انگلیسیه من زیاد متوجه طرز کاره توابع نمیشم. توی نت خیلی گشتم اما نتونستم پیدا کنم.ممنون میشم اگر راهنمایی کنید
سلام ببخشید دیتا شیت فارسی nrf رو اگه ممکنه برای دانلود بذارید.چون توضیحاته دستورات توابعی که توی کتابخانه ش هست به زبانه انگلیسیه من زیاد متوجه طرز کاره توابع نمیشم. توی نت خیلی گشتم اما نتونستم پیدا کنم.ممنون میشم اگر راهنمایی کنید
سلام
در همین آموزش که توابع رو توضیح دادم!!
سلام بله تشکر
ولی توی کتابخانه ش خیلی بیشتر از اینا تابع داره
میخواستم کاملشو داشته باشم
بله ولی زیاد ضروری و مشکل نیستن
به هر حال ممکنه چند وقت بقیه توابع را آموزش بدم
ممنون. خیلی عالی میشه اگه آموزش بدین
سلام وخسته نباشید ،آیا میشه از این ماژول برای تقویت گیرندگی رادیو fm استفاده کرد
با سلام
خیر ارتباطی به هم ندارند.
سلام
من یه مشکل دارم تو گیرنده فکنم، شایدم فرستنده
گیرنده همه ش صفر میده بیرون
اینم لینک عکسش، بنظرتون چ کنم؟
http://uupload.ir/files/deih_untitled_picture.png
پینگ پونگ (فرستنده و گیرنده با یک ماشول) رو ک خواستم درست کنم، اونم فیلد میشد، یه خازن به خروجی۳٫۳ برد سری کردم ، مشکلش حل شد(مشکلش نویز رگلاتور بود فکنم)،
ولی الان نمیدونم چی کار کنم
.
.
.
بعد اگه فرستنده رو قطع کنم، گیرنده میفهمه ولی اطلاعات غلطه وقتی وصله!!!!!!!!!
اینم کد ها
فرستنده:
http://s6.picofile.com/file/8238600676/tx.txt.html
گیرنده:
http://s6.picofile.com/file/8238600734/rx.txt.html
سلام
code completion با چه کلیدی در IDE فعال میشه ؟ “توی فیلم code completion استفاده شده”
سلام
این یک IDE غیر رسمی آردوینو
مشکلش اینه که نسخش خیلی قدیمیه و دیگه توسعه داده نمیشه
سلام.اگر امکانش هست اسم یا لینک دانلودی از این IDE که قابلیت auto completion رو داشته باشه بفرمایید.
با سپاس از شما.
ممنون پیداش کردم.
http://iot.criativasoft.com.br/arduino
سلامت باشید.
بازم یه سوال. شما که تجربه کار باش رو دارید آیا مشکل باش نداشتین؟
میتونیم بدون نگرانی ازش استفاده کنیم؟
محدودیت یا نقظه ضعف یا ….؟
بنده با این ماژول کار نکردهام، ولی کاملا reliable است. از دیگر کاربران که با این ماژول تجربه کار عملی دارند، تقاضا دارم تا در این بحث شرکت کنند و تجربهشان را به اشتراک بگذارند.
فکر کنم سوالم رو درست بیان نکردم و بابتش معذرت میخوام.
منظورم تجربه کار با ماژول نبود. منظورم تجربه کار با IDE دارای قابلیت autocomplete هست.
متشکرم.
سلام مجدد
کامپایلر آردوینو تا نسخه ۱٫۶٫۹ به صورت رسمی از این موضوع پشتیبانی میکرد ولی بعد از این نسخه قابلیت Autocomplete برداشته شد. ولی به صورت غیر رسمی برای برخی نسخهها ارایه شده است.
سلام یه سوال
تکلیف این پایه ی IRQ ماژول چیه
کجا باید وصلش کنم هر چی متنتونو می خونم نمی فهمم
لطفاً کمکم کنین
سلام
همینطور که میبنین به جایی متصل نشده پس شما هم نباید به جایی متصلش کنین و بزارین آزاد باشه
سلام مچکرم از راه نماییت
یه سوال دگه حتماً باید از این اردینو ها استفاده کنم یا با اردینو هایه دگه هم مشه این کار رو کرد مثلاً من یه نانو شو دارم می خواستم ببینم می شه
سلام
خواهش میکنم
از هر آردوینویی که دوست داشته باشین میتونین استفاده کنین
سلام اگه جوی استیک و سروو رو نخوای باید چکار کنی؟
من تازه کارم بم نخند
سلام اگه جوی استیک و سروو رو نخوای باید چکار کنی؟
من تازه کارم بم نخند
اگه تازه کار هستید که بنظر من این پروژه کمی براتون میشکله. اگر جوی استیک را بردارین میخواین چه اطلاعاتی را بفرستین؟
سلام وقت بخیر
شرمنده موقع کامپایل کدها یهو ارور میده سه تا کتابخانه nRF24 رو نمیشناسه
میشه راهنمایی کنید
درود
بنده الان با آردوینو ورژن ۱٫۶٫۷ تست کردم هیچ مشکلی نداشت
احتمالا کتابخانه ها را درست نصب نمیکنید
اضافه کردن کتابخونه رو دقت نکرده بودم
حل شد .. یه کم درمورد اضافه کردن کتابخونه توضیح بدید برای خیلی ها میتونه کمک باشه
دانلود فایل زیپ از صفحه معرفی شده .. منوی اسکچ..اضافه کردن کتابخانه بصورت زیپ..معرفی فایل زیپ
آموزشش قرار داده شده
آموزش نصب کتابخانه در arduino
بسیار عالی ممنونم
بعد کلی کار با بیسیک از اول شروع کردن با آردوینو گرچه خیلی امکانات عالی داره ولی تند تند پیشرفتن رو سخت میکنه
اسباب زحمت من یه برنامه میخوام قسمت فرستنده مقدار ADC رو بخونه روی LCD نمایش بده بعد به گیرنده بفرسته
برنامه مشابه آماده دارید بهم معرفی کنید
سرهم کردن کامل کدها بدون ارور کار سختیه
آقا متوجه شدم کدوم قسمت کدهای همین پروژه رو باید استفاده کنم .. بازم مرسی مطالبتون عالیه
باسلام و تشکرفراوان
اگه بخوایم به جای nrfازrfاستفاده کنیم کدها فرق میکنه؟لطفا یه مقدار توضیح بدید.
ممنون
سلام اگه فقط بخوایم ۱ ارسال کنیم با چه دستوری باید انجام بدیم؟ radio.write(, sizeof());
باتشکر
سلام
داداش یه شماتیک میزاری؟؟
برای کنترل خاموش و روشن کزدن یه کلید LED چکار کنم؟؟
لطفا راهنمایی کنید.
سلام
ممنونم به خاطر اموزش خوب و کاملتون.
فقط دو سوال دارم:
۱- توی دستور radio.openReadingPipe چرا ارگومان اول رو صفر گذاشتید؟ مگه نگفتید تعداد فرستنده ها رو مشخص میکنه
۲- توی کلیپی که گذاشتید از چه کلیدی استفاده میکردید که برای هر دستور راهنما میداد و کاملش میکرد؟
کسی نیست جواب مارو بده؟
سلام
با تشکر از مطالب خوبتون
من فیلم انتهای صفحه رو دیدم و متوجه شدم در نرم افزار IDE شما کدها Autocompletion هستند. ممکنه راهنمایی بفرمایید این کار چطور در نرم افزار IDE ممکنه؟
با تشکر
سلام
با تشکر از مطالب خوبتون
من فیلم انتهای صفحه رو دیدم و متوجه شدم در نرم افزار IDE شما کدها Autocompletion هستند. ممکنه راهنمایی بفرمایید این کار چطور در نرم افزار IDE ممکنه؟
با تشکر
سلام
منم سوالم همین بود توی اینترنت گشتم پیداش کردم.
ازاین لینک میتونی برنامه رو دانلود کنی:
http://iot.criativasoft.com.br/arduino/
این کلیپ هم تمام قابلیت های این ورژن رو توضیح میده:
https://www.youtube.com/watch?v=jSRuVy_fcVM
موفق باشی
با سلام
من دو تا ماژول nrf24l01 معمولی دارم که تنها وقتی کار میکنند که دستم رو اطراف ماژول نگه دارم یا اینکه به کل پایه ی gnd ماژول رو وصل نکنم!
به نظرتون مشکلشون چیه؟
با سلام و تشکر بابته مطلب
مدار رو دقیقا به شکل بیان شده بستم ولی چرا واسه من کار نمیکنه؟
هر کاری کردم درس نشد
لطفا راهنمایی کنید
[…] آموزش راه اندازی nrf24L01 به همراه جوی استیک و آردوینو […]
ببخشید میشه زحمت بکشی محل اتصال ماژول جوی استیک با آردوینو بذارید بتونم وصل کنم
باسلام و تشکر بابت مطالبی که به صورت رایگان ارائه شده.
گفتید که با دستور radio.begin() ارتباط فعال میشه حالا اگه بخوایم وسط برنامه این ارتباط قطع شه دستورش چیه؟(لطفا محبت کنید و به ایمیلم بفرستید)
سلام… ممنون بابت مطالب مفیدتون.
میشه توضیح بدین چرا آرایه ی joystick رو بصورت آرایه ی سه تایی استفاده کردین و نه بصورت متغییر ساده. در ضمن چرا سه تا؟؟
دز ضمن من این مدار رو دقیقا بستم. توی سریال مانیتور failed میزنه و توی هر دو آردوینو فقط ال ای دی چشمک میزنه.
درود
آرایه ی joyStick را به صورت آرایه ی ۲ تایی تعریف کردم نه سه تایی .
دلیل استفاده از ارایه هم به این دلیل بوده که جوی استیک دارای دو مقدار x و y و اگر بخواهیم هر بار متغیر ارسال کنیم فقط برنامه ی خود را پیچیده تر کرده ایم پس بهتر است با آرایه این کار را انجام دهیم
سلام
من اینو راه انداختم جواب داد روی مدل بدون انتن اما روی انتن دار جواب نمیده!!!!
رو سالم بودن وصحت سخت افزار هام مطمئنم
البته اینم بگم روی انتن دار فقط بار اول ارسال میشه و دیگه fail میشه…
درود تغذیه ماژول را از تعذیه آردوینو جدا کنید
احتمالا آردوینو نمیتونه جریان ان ار افتون رو تامین کنه
اینکارو هم کردم مشکل حل نشد
ماژول تست شده سالمه
ایراد از برنامه هست لطفا پیگیری لحاظ کنید
سلام دوستان مشکل من حل شد
در مدل انتن دارپایه ی irqرا به۱۰وصل کردم
از همین برنامه استفاده کردین؟
امکنش هست عکس ماژول را برای ما ارسال کنید
درود
همانطور که در کلیپ مشاهده میکنید با همین برنامه nrf به درستی کار می کند. برنامه قبلا تست شده است و مشکلی نداره
سپاس
[…] این توضیح دوستمو رو هم بخون http://digispark.ir/%D8%B1%D8%A7%D9%…F%D9%88%DB%8C/ […]
سلام میشه بگید باچه دستوری باید توان مدل انتن دار را ماکزیمم کرد؟
در صورت امکان جوابشو به ایمیل هم بفرستید
متشکرم
سلام .ممنون از آموزش های مفیدتون
من می خوام از دوتا nrf برای دوتا فرستنده و یک nrfبرای یک گیرنده استفاده کنم البته با آردینو.در قسمت گیرنده برای مشخص کردن این که از کدام فرستنده دیتا دریافت شود و در کجا ذخیره شود از چه کد هایی باید استفاده کنم
سلام یه سوال داشتم/
پین های Joystick رو به چی باید وصل کنیم؟/
با سلام
پایه ۰ به پین آنالوگ A0 و پایه ۱ جوی استیک به پین آنالوگ A1 متصل میشوند.
با سلام و خسته نباشید میخاستم راهنمایی کنید که برای راه اندازی این ماژول nrf24l01 میتونم فرستنده و گیرنده تو مدی قرار بدیم که یک ورودی بدیم و ان طرف با گیرنده همون ورودی دریافت منظورم این ورودی و خروجی بشکل سیگنال باشن و بجای مشاهده در مونیتور اثرش را بصورت الکترونیکی ببینیم در کل میخام بگم مثلا من یه ورودی سیگنال مثلا معادون قرمز بدم توسط ماژول معادون قرمز بعد تو گیرنده همین سیگنال دریافت کنم اگه این امکانش هست لطفا راهنمایی کنید که اولا تغییری تو کد برنامه فرستنده و گیرنده باید بدیم؟ دوم اینکه چه پایه هایی ورودی تو فرستنده و چه پایه ای خروجی تو گیرنده هست؟ممنون از راهنمایتان
ضمن تشکر از جنابعالی
شایسته بود یک عکس کلی از شماتیک مدار که شامل جوی استیک و سروو موتور و دیکر قطعات تهیه و در سایت گذارده میشد که بعنوان مرجع از ان استفاده کرد دقیقا پین قطعات جوی استیک و سروو موتور مشخص نشده برای چیست؟ و کجاست … خیلی ممنون
سلام .همینطور که شهرام جان گفتند یک عکس کامل از برنامه شامل جوی استیک و پوش باتن و در گیرنده با رله قرار دهید.اگرم امکانش هست بگویید چطور میشه تعداد رله هارا کم و زیاد کرد.مثلا من میخوام یه ریموت کنترل ۸ کانال با این ماژول درست کنم.میشه بیشتر راهنمایی کنید؟
چطور میشه کد بندی کرد که با ماژول های اطراف تداخل نداشته باشه؟
سلام ممنون از اطلاعاتتون میخواستم بدونم ادرس گیرنده رو بر چه اساسی مشخص کردید(rxAddr[6] = “00001)
من ی سری اطلاعات از sdcard به کامپیوتر میفرستم میخواستم بدونم ادرس گیرنده من که کامپیوتر های متفاوت ممکنه باشه چی بنویسم؟؟؟
با سلام و خسته نباشید به شما
بنده در راه اندازی nrf مشکل دارم البته فقط درمورد lna دار تمام برنامه ها با مدل معمولی کار میکنند اما با مدل lna دار نه
البته در گیرنده هردو ماژول کار میکنند اما در فرستنده فقط مدل معمولی . با چندین برنامه هم تست کردم همینطور بود .
لطفا راهنمایی کنید
سلام یک سوال ضروری برای خرید
ماژولnrf24le1 چه فرقی با nrf24l01 داره ؟
آیا میشه با این آموزش اون ماژول رو راه اندازی کرد ؟
آیا بی سیم هم میشه راه انداخت با این ماژول ؟
ممنون
با سلام
ضمن عذرخواهی بابت تاخیر در پاسخگویی، ماژول NRF24LE01 قابلیت برنامه ریزی دارد. یعنی دارای GPIO میباشد و بدون نیاز به برد کمکی میتوان به صورت مستقل روی آن کدها را کامپایل کرد. ولی ماژول NRF24L01 فقط به واسطه یک پردازنده دیگر میتواند راه اندازی شود و به صورت مستقل کارایی ندارد.
برای راه اندازی با این کدها باید از کتابخانهها و آدرسدهی مرتبط با همان ماژول استفاده کنید.
مرسی از سایت و مطالب خوبتون
سلام ممنون از سایت جامع و کاملتون . یک سوال داشتم . آیا راهی هست که بشه به بیش از ۶ ماژول اطلاعات رو ارسال و دریافت کرد ؟
استاد من ار برد مینی استفاده کردم com بهش وصل شده ولی وقتی کد ها رو اپلود میکنم ارور ۵۰۰ میده
با سلام
برای این موضوع باید نوع برد و آدرس دهی پین ها را در برنامه تغییر دهید.
نوع برد رو تو نرم افزار تعقیر دادم ولی منظورتون رو از پین ها نمی فهم
من از ماژول USB to Serial PL2303 استفاده میکنم و همونطور که می دونید dtr نداره میتونه مشکل از اونجا باشه
اگه میشه یخورده دربارش توضیح بدین وبگین راه حلش چیه
پیرو این موضوع اگر از طریق رابط usb با مبدل انجام میدهید، باید منتظر دریافت پاسخ از سوی کاربرانی که به این روش کار کرده اند باشید.
سلام ببخشید میشه بجای این ماژول از ماژول سری + (ماژول NRF24L01+PA+LNA) استفاده کرد؟؟
با سلام
بله میتوانید، از آنجایی که کتابخانه و پینها یکسان است، میتوانید انجام دهید.
سلام وقتتون بخیر میخواستم بدونم با این مدل تست کردید به جواب رسیدید؟
سلام ممنون از مطالبتو دوتا سوال داشتم اول این که تعریف شی برای چیه؟ اصلا کارش چیه .و سوال دوم تابع sizeof دقیقا چ مقداری رو بر میگردونه کارش چیه؟
با سلام
ضمن تشکر از توجه شما
۱- ساختن شیئ در کدهای آردوینو مربوط به قوانین برنامه نویسی ++C میباشد.
۲- تابع Sizeof جهت مشخص کردن میزان مقادیر ارسالی توسط جوی استیک است که به صورت اتوماتیک اندازه گیری میشود.
ممنون از پاسخگویی ب موقعتون.
منظورتون از مقادیر ارسالی توسط تابع sizeof همون مقادیر ۰ تا ۱۰۲۳ هست؟
ببخشید چون من ب قطعات دسترسی ندارم ک تست کنم وقتتون رو میگیرم.
فعلا مجبورم تئوری کار کنم.
با سلام
خواهش میکنم. بله در این کدها همون مقادیر است.
سلام میشه اموزش بزارین که دسته ps3 رو وصل کنیم به اردوینو و ماشین کنترلی رو هدایت کنیم فقط یه زره عجله دارم
ممنون
با سلام
از توجه شما ممنونم، در حال حاضر امکان تولید این آموزش وجود ندارد. شما میتوانید با انتشار کامنتتان در شبکههای اجتماعی از دیگر کاربران برای رفع عیب شما درخواست کنید.
سلام
ایا هر ماژول یک ادرس جدا داره
اگه داره چطور میشه پیداش کرد ؟
درود بر شما
ضمن تشکر از توجه شما، برای این منظور خودتان باید در کدها به هر ماژول یک آدرس نسبت دهید.
سلام . من این ماژول هارو دارم با اردویونو مگا و آنو . همین برنامه رو نوشتم ولی گیرنده چیزی دریافت نمی کنه که به سروو ها بده . ماژول های nrf24L01 رو چک کردم . سالم هستند ولی فرستنده اطلاعات رو از جوی استیک می گیره و میفرسته (تا اینجاش مطمئنم چون با سریال مانیتور چکش کردم) ولی اینکه چرا گیرنده نمی گیره هنوز راهی برای حل مشکلش پیدا نکردم . **لطفا کمک کنید.**
با تشکر از سایت خوبتون.
با سلام
ضمن تشکر از توجه شما، برای این منظور از تغذیه مجزا برای nrf استفاده کنید. همچنین از یک خازن ۱۰۰ میکرو نزدیکی پین تغذیه nrf استفاده کنید.
سلام و خسته نباشید.
مشکلی که من با nrf خودم دارم اینه که با اینکه تغذیه هر دو ماژولم رو به ۳٫۳ ولت ثابت وصل کردم ولی هر کاری میکنم هیچ کدوم از ماژول ها دریافت نمیکنند(ماژول ها ارسال میکنن ولی دریافت نمیکنند.)…
ممنون میشم اگه راهنمایی کنید
با سلام
ضمن تشکر از توجه شما، لطفا کدهای گیرنده را ارسال کنید تا بررسی شود.
سلام
از انجایی که گفتین این ماژول رگولاتور داخلی داره
یعنی میشه به تغذیه ۵ ولت هم وصلش کرد یا نه؟؟؟
با سلام
ضمن تشکر از توجه شما، در این زمینه پیشنهاد میکنم حتما به اطلاعات دیتاشیت مراجعه کنید.
سلام
برای ساخت هواپیمای کنترلی دو عدد ماژول nrf نیاز دارم چه ماژولی باید تهیه کنم لطفا راهنمایی کنید
با سلام
ضمن تشکر از توجه شما، همانطور که خودتان اعلان کردهاید به ماژول NRF نیاز دارید. لطفا سوالتان را دقیقتر بیان کنید.
من یک عدد ماژول +NRF24L01 ویک عدد NRF24L01+PA+LAN میخاهم تهیه کنم
آیا این دو نوع ماژول برای هواپیما کنترلی کاربرد داره
از ماژول اول بعنوان گیرنده و از ماژول دوم هم بعنوان فرستنده میخام استفاده کنم.
با سلام
ضمن تشکر از توجه شما، در این خصوص ماژول NRF یکی از انتخابهای مناسب است. ولی در خصوص اطلاعات فنی باید از کاربرانی که در این زمینه تجربه عملی دارند؛ راهنمایی دقیق دریافت کنید.
با عرض سلام وخدا قوت
میشه ماژول ها هم فرستنده باشن هم گیرنده یعنی سیستم اول اطلاعات رو بفرسته سیستم دو دریافت کنه و باتوجه به چیزی که دریافت کرده اطلاعات بفرسته و سیتم اول دریافت کنه به طور کلی میشه نقل و انتقال داده دو طرفه داشت .
سوال دیگه اینکه آردوینورو میشه تو ووید لوپ ورودی و خروجی پین هاشو مشخص کرد.یعنی مثلا پین ۱۱ اول برنامه خروجی باشه و وسط برنامه ورودی .
با سلام
ضمن تشکر از توجه شما، در خصوص فرستنده گیرنده بودن، بله این ماژول قابلیت این کار را دارد. در خصوص سوال دوم، دقیقا مطمئن نیستم. از دیگر کاربران که در این زمینه تخصص کافی دارند، تقاضا دارم تا در این بحث شرکت کنند.
از پاسختون ممنونم
سلامت باشید.
با سلام و عرض خسته نباشید
دقیقا خازن رو به چه پایه هایی باید وصل کنیم؟
با سلام
ضمن تشکر از توجه شما، همانطور که در متن آموزش ذکر شده است، بین راه پایه تغذیه VCC ماژول متصل کنید.
خواهش میکنم. یعنی بین VCC , GND؟؟ در این صورت چرا دوتا؟اگه موازی باشه میشه ۲۰ میکرو گذاشت، اگه سری منظورتونه میشه ۵ میکرو گذاشت…دقیقا متوجه نشدم پایه های خازن به کجا وصل میشه
سلام مجدد
خیر به هردوتا که نیازی نیست متصل شود. منظور از تغذیه فقط پایه VCC است. بین پایه VCC آردوینو و ماژول باید خازن قرار دهید.
با سلام اقای مهندس علیرضا قربانی اگرامکان تماس تلفنی میسر هست لطفاشماره تماس تان را به فرمائید با تشکر
با سلام
در این خصوص فعلا امکان وجود ندارد. از همین طریق موارد مورد نظرتان را بیان کنید.
سلام نمیشه از دوتا اردوینو mini یا pro ویا دوتا uno استفاده کرد؟ حتما باید یکی مگا باشه میخوام جمع جور و ارزون باشه اردوینوها.
با سلام
ضمن تشکر از توجه شما، بله میتوانید استفاده کنید، مشکلی ندارد.
سلام ایا میشود از این ماژول برای رادیوکنترل استفاده کرد؟
اگه در رادیو کنترل استفاده بشه بردش در فضای باز به ۵۰۰ یا ۷۰۰ متر میرسد؟
با سلام و تشکر از توجه شما
بله میتوانید استفاده کنید، در این خصوص طبق اطلاعات موجود در دیتاشیت تا ۱ کیلومتر در فضای باز برد خواهد داشت. ولی در شرایط اجرایی ممکن است متفاوت باشد.
سلام میشه ۲۲ تا فرستنده رو به یک رسیور متصل کرد ؟ حالا همزمان نشد اشکال نداره چطوری بگم مثلاً ۶ تا ۶ تا ارسال کنند؟ میشه راهنمایی بفرمایید؟؟
با سلام و تشکر از شما
همانطور که در دیگر سوال شما اطلاع رسانی شد، اولا به دیتاشیت مراجعه بفرمایید. سپس از دیگر کاربران که در این خصوص تجربه کار عملی دارند، تقاضا میشود تا در این بحث شرکت کنند.
سلام این خط که توی برنامه ی گیرنده نوشتید چه کاری انجام میده ؟
;(servo.attack(3
با سلام
این تابع مربوط به کتابخانه Servo.h میباشد. عدد مربوطه شماره پایه آردوینو است. در این آموزش پایه ۳ به عنوان سیگنال سرو موتور میباشد.
سلام
ممنون بابت آموزش ها و زحماتتون
من یه سوال داشتم که ممنون میشم راهنمایی کنین
من می خواستم با یه فرستنده گیرنده بیسیم صدا رو به فاصله حدود ۱۵۰ تا ۲۰۰ متری منتقل کنم(محیط خانه تقریبا) ، البته کیفیت صدا خیلی برام مهم نیست. بهترین گزینه برایه ارسال صوت تو این فاصله از نظر شما چی هست؟و برای میکروفون از چه ماژولی استفاده کنم؟
با سلام و تشکر از توجه شما
از نظر بنده استفاده از ماژولهای رادیویی ۴۳۳ مگاهرتز یا باندهای دیگر میتواند مناسب باشد. البته بنده با این ماژولها تجربه عملی ندارم. از دیگر کاربران که در این زمینه تجربه دارند، تقاضا دارم تا در این بحث شرکت کنند.
ن تو ی پروژه میخوام از ماژول کارت حافظه sd و nrf استفاده کنم و هر دو از پروتکل spi استفاده می کنند میشه جفتش با هم فعال باشند ؟
سلام وقت بخیر.
آیا میشه با این ماژول، تصویر انتقال داد؟
با سلام
اگه ممکنه برای ارسال صوت و تصویر از طریق nrf24l01 راهنمایی کنید؟
با سلام و تشکر از شما
همانطور که پیشتر هم توضیح داده شد، بایستی کتابخانه مربوطه را بررسی بفرمایید.
با سلام
من دوتا داده اندازه گیری کردم و میخوام این دو داده رو با nrf به به یه محل دیگه بفرستم یعنی nrf اول فقط نقش فرستنده داشته باشه و nrf دوم فقط نقش گیرنده ، ممکنه که راهنماییم کنید برای ارسال دو داده باید چیکار کنم
ممنون
با سلام
برای این منظور باید از توابع مربوطه در کدهای آردوینو استفاده کنید. اگر به همین آموزش دقت کنید، متوجه میشوید.
سلام
میشه از ۱ nrf به چنتا nrf با آدرس متفاوت دیتای متفاوت ارسال کرد؟
بدون اینکه همه گیرنده ها اون دیتا رو بگیرن؟
با سلام
متاسفانه بنده این موضوع را تست نکردهام و نمیتوانم پاسخ قطعی بدهم.
سلام
من وقتی ماژول رو روشن می کنم سروو هیچ حرکتی نمی کند
تمام اتصالات و تغذیه رو هم چک کردم ولی فرقی نکرد
برای سروو هم از تغذیه جداگانه استفاده کردم
چیکار باید بکنم؟
ممنون
با سلام
از چه سرو موتوری استفاده میکنید؟
از سروو موتور ۱۸۰ درجه ۵ ولت
مدل : sg5010
برای این سرو نیاز به درایور مجزا دارید. لطفا تست و سپس اطلاع رسانی کنید.
سلام و خسته نباشید.
ممنون از آموزش های خوب و جامع تون.
من می خوام توی فرستندم ۱۶ تا میکرو سوئچ داشته باشم و توی گیرندم ۱۶ تا رله.زمانی که میکروسوئیچ یک رو فشار میدم رله شماره یک روشن بشه و زمانی که دستم از روی میکرو سوئیچ بر میدارم رله خاموش بشه و این پروسه برای هر ۱۶ تا میکروسوئچ همین جوری باشه.
۱-آیا همچین چیزی با این ماژول قابل اجرا هست؟
اگه هست لطفا لینک آموزشش رو برامون بزارید
بازهم ممنون از آموزش های خوبتون
با سلام. ممنون از مطلب خوبتون. من متاسفانه نتونستم بین دو ماژول ارتباط بگیرم. خواستم ببینم کدی وجود داره صحت عملکرد ماژول رو تست کنه؟ مثل AT که به مثلا ماژول HC-05 ارسال میشه و OK پاسخ میده؟
متشکرم
با سلام
برای این منظور از لینک محصول NRF فایل تست را دانلود کنید. سپس نتیجه را پس از بررسی از همین طریق اعلام کنید.
سلام من موقع راه اندازی ماژول nrf در فرستنده هر چی ارسال می کنم از اون طرف صفر دریافت می کنم فکر کنم چون خازن مناسبی در قسمت تغذیه نذاشتم درسته؟
چون وقتی خازن ها رو دست کاری می کنم گاهی اوقات اون مقداری که می خواهم را در خروجی دریافت می کنم الان باید چی کار کنم؟
چه خازنی مناسب است؟دوتا ۱۰ میکرو فاراد رو امتحان کردم
با سلام
در این خصوص اتصالاتتان را باید بررسی کنید. سپس نتیجه را از همین طریق اعلام بفرمایید.
با سلام شریفی هستم و طرح بسیار دارم ولی دانسته هایم به انجا رسیده ایا امواج را تا ۱۱۰۰ متر میتوان به کوهستان برای یافتن مس فرستاد با استفاده از موتورهای معمولی امواج را ارسال کرد با سپاس
باسلام
ضمن تشکر از توجه شما، خیر چنین موردی با این تجهیزات امکان پذیر نیست.
سلام وقت بخیر.
میشه با اتصال آردوینو promicro بهnrf24l01 یک پالس مربع که فرکانسش دائما از ۱KHz تا ۲KHz تغییر میکنه را به فاصله ۵۰ متر ارسال کرد؟
متشکرم
با سلام
در خصوص نوع دیتای ارسالی اطلاعی ندارم. ولی در صورتی که کاربران دیگر در این خصوص اطلاعی داشته باشند از همین طریق به شما اطلاع رسانی خواهند کرد.
سلام ممنونم از سایتتون که من که مبتدی خیلی سطح پایینی متوجه شدم .
فقط یه سوال برام مونده ببخشید میخوام از این برد در هواپیما الکتریکی استفاده کنم در هواپیما از دو سرو استفاده شده بقیه ش مربوط به سرعت کم و زیاد هست یه چیزه دیگه اینه که در هواپیما از همون سرو علاوه بر بالا و پایین رفتن برا چپ وراستم استفاده میشه میخوام اینو بگم از همین برد با همین کد نویسی میشه استفاده کرد یانه باید بعضی موارد و تغییر داد ممنون میشم از پاسختون
با سلام و تشکر از شما
برای کنترل این موارد طبیعتا به تغییرات در کدها نیاز خواهید داشت.
سلام وقت بخیر
ببخشید من برنامه شما را اجرا کردم ولی سرو هیچ عکس العملی نداره.
جچوری میشه فهمید که ارتباط میان ماژول ها برقرار است؟؟؟؟
led نارنجی یکی اردوینو ها روشن نمیشه.
اگه میشه ی راهنمایی کامل بکنین/
با تشکر
با سلام
وضعیت سریال مانیتور را اعلام کنید.
با سلام وخسته نباشید.
چند تا سوال داشتم:
۱- میخواستم ببینم مشکلی نداره از دوتا برد آردوینو uno استفاده کنم به جای این کاری که شما کردید؟
۲-اشکالی نداره که از ماژول nrf24l01با آنتن داخلی استفاده کنم؟
۳-اگه به جای سرور موتور بخواهم از آرمیچر استفاده کنم باید کد رو تغیر بدم/وچه جوری؟
ممنون میشم جواب بدید.
باسلام
۱- خیر مشکلی ندارد.
۲- خیر موردی ندارد.
۳- بایستی تغییرات زیادی در کدها بدهید. برای این منظور آموزشهای زیر را بررسی کنید.
آموزش راه اندازی موتور DC با درایور موتور L298N و برد آردوینو – بخش اول
۳ روش راه اندازی سرو موتور servo motor با Arduino آردوینو
باسلام ببخشید میتونم به یه آردوینو دو تا از این ماژول ها رو وصل کنم که از یکیش به عنوان RX و از اون یکی به عنوان TX استفاده کنم. یعنی یه چیزی بسازم که انتقال دوطرفه باشه
با سلام
نیازی به اتصال دو ماژول NRF به یک آردوینو نیست. هر ماژول میتواند همزمان فرستنده و گیرنده باشد.
با درود فراوان.
بنده تمام کار هایی که گفتین رو انجام دادم
اما کار نمیکنه.
دیگه مغزم نمیکشه
با سلام
کاربر گرامی برای رفع عیب و دریافت راهنمایی بایستی اطلاعات کاملی ارایه کنید. اینکه صرفا اعلام میکنید همهی کارها را انجام دادهاید ولی کار نمیکند. ما نمیتوانیم بر اساس حدث و گمان مورد شما را رفع عیب کنیم. لطفا مساعدت فرمایید و دقیقا توضیح دهید و هرجایی که نیاز به راهنمایی بود، در ادامه همین بخش مطرح کنید.
سلام
من با استفاده از دو اردوینو و سنسور ecg میخوام یه سیستم پایش ضربان قلب از راه دور درست کنم
با استفاده ازین ماژول میشه داده هارو بصورت realtime مخابره کرد؟
با سلام
طبق اطلاعات تئوریک این کار امکان پذیر است. پیشنهاد میکنم این مورد را در پست زیر مطرح کنید. تا بررسی دقیقتری صورت گیرد.
آموزش NRF24L01
می شه تصویر و صوت با آن ارسال کرد؟
با سلام
بله کتابخانه صوت NRF را بررسی کنید. پیشنهاد میشود کتابخانه RF24Audio را بررسی کنید.
سلام
مهندس من مسافتی که میخوام از ماژول استفاده کنم ۲۰۰۰ متر هست که بیشتر از برد این ماژول میشه
حالا میشه یک ماژول هم در میانه راه قرار داد که سیگنال فرستنده رو بگیره و به گیرنده نهایی انتقال بده؟
مدار و کد هاش چجوری میشه؟
ممنون از شما
با سلام
در خصوص مسافت مد نظر پیشنهاد میشود از ماژولهای دیگری استفاده کنید. در خصوص استفاده از ماژول NRF در بین راه جهت تقویت سیگنال اطلاعی ندارم.
چه ماژول پیشنهاد میدید؟
اگر حجم دادههای ارسالی زیاد نباشد، ماژولهای لورا برای این منظور مناسب هستند. لینک زیر را بررسی کنید.
انواع ماژول لورا
سلام
مهندس من میخوام با استفاده از این ماژول به نقطه ای در فاصله ۲۰۰۰ متری یه فرمان ارسال کنم که در رنج این ماژول نیست
میشه با استفاده از سه تا ماژول اینکاروکرد؟
یعنی اولی ارسال کنه دومی دریافت کنه و بعد برای دریافت کننده سوم ارسال کنه
اگر امکانش هست لطفا راهنمایی کنید.
با سلام، بله این امکان وجود دارد که دیتا از یک node به node دیگر ارسال شود، اما با توجه به مورد استفاده شما، پیسنهاد می کنم از برد هایی مانند LoRa استفاده کنید. در غیر این صورت توجه داشته باشد رنج ارسال دیتا در این ماژول در فضای باز تا ۱۰۰ متر می باشد(بدون آنتن) و با استفاده از آنتن ۱٫۱ کیلومتر که البته این میزان در شرایط ایدهعال امکان پذیر بوده و در حالت عادی امکان packet loss و همچنین قطع ارتباط وجود دارد.
سلام، آیا میشه از پین های pwm که به nrf وصل شده استفاده دیگری مثل کنترل سروو کرد؟
به پین pwm زیاد نیاز دارم بخاطر اون
با سلام
این مورد را تست نکرده ایم. ولی پیشنهاد میشود این سوال را در پست زیر هم پیگیری کنید.
شروع کار با برد nRF24L01
سلام من این پروژه رو میخواستم راه اندازی کنم کد نویسی اش هم کردم اما سروو موتور تکون نمیخوره و ال ای دی پین ۱۳ آردوینو هم چشمک نمیزنه
با سلام
این مورد از چند بخش مختلف میتواند بوجود بیاید، بایستی مواردی از جمله یکسان بودن بردهای فرستنده گیرنده، اتصالات و همچنین rxAddr را است. کلیه این موارد بایستی عمیقا بررسی شوند تا بتوانید مشکل را رفع کنید.
مخوام در موردهواپیمای کنترل از را ه دور تحقیق کنم و بسازم و میدونم میتونی کمکم کنید تک زنگ بزن تا تماس بگیرم واز راهنمایی هات استفاده کنم ممنون میشم.
با سلام
در این خصوص بایستی اطلاعات فنی و عمومی راجع به ساخت و روش کنترل و هدایت هواپیمای کنترلی داشته باشید. از این سمت موردی جهت راهنمایی فراهم نیست.
سلام
من از این ماژول یک رادیو کنترل به همراه گیرنده ساختم ولی هر کاری میکنم کار نمی کند ؟
با سلام
درخواست شما ناقص است، موارد مختلفی در این مورد دخیل هستند. بایستی یک به یک همگی را بررسی کنید. حتی نسخه کتابخانههای مورد استفاده هم تاثیر دارند. لطفا از ارسال سوالات ناقص و کوتاه اینچنینی خودداری کنید.
سلام
اینجا به joystick گیر میده میگه شناسایی نشد چیکار کنم؟
با سلام
لطفا ارور دریافتی را در ادامه همین پیام، ارسال کنید.
سلام مهندس . وقت بخیر . بنده برا یه پروژه مجبورم این ماژول رو راه اندازی کنم ولی هیچ داده ای ارسال و دریافت نمیشه . میخواستم بگم که اگر امکانش هست ، شما با دوتا از این ماژول و دوتا برد آردوینو پرو مینی برا من یه برد گیرنده و فرستنده تهیه کنید. هزینه هم پرداخت میکنم. ممنون
با سلام
برای رفع عیب بایستی اطلاعات کاملتری در ادامه همین کامنت ارسال کنید تا بتوانیم راهنمایی کنیم. در خصوص اجرای پروژه، چنین اقدامی امکان پذیر نیست.
سلام خسته نباشید
امکانش هست که ماژول انتن دار با بدون انتن ارتباط برقرار کنه؟
با سلام
این مورد را بنده تست نکردهام. از دیگر کاربرانی که در این خصوص تجربه دارند تقاضا دارم تا در این بحث شرکت کنند.
سلام
اگر بخواهیم به جای ماژول جوی استیک کلید فشاری قرار دهیم و دستورات را با کلید بفستیم مثلا هنگام وصل کلید زاویه ۱۲۰ بگیرد و هنگام قطع صفر شود
با سلام
در این صورت بایستی شرط گذاریها را در کدنویسی عوض کنید.
سلام قربان ، بنده تو این رشته اطلاعات کافی ندارم ، بنده دنبال یک فرستنده یا گیرنده بدون سیم کارت هستم در ۵۰ متری سطح زمین زیر خاک فرکانس بفرسته و متوجه بشم که این شی در این مکان و این قسمت زیر خاک هست ، اگر بنده رو راهنمایی کنید ممنون میشم
سلام لطف میکنید مونتاژ رو هم بگید.
با سلام
به بخش اتصالات آموزش مراجعه کنید.
سلام مونتاژ دستگاه هم اعلام می کنید
سلام
اگربخواهیم ازاین ماژول برای تقویت ریموت درب پارکینگ استفاده کنیم چه مواردی را لازم است انجام دهیم
با سلام
ماژول NRF24L01 برای این منظور قابل استفاده نیست.
سلام وخسته نباشید
ببخشید میخواستم ببینم امکانش هست که با این ماژول یک رادیو کنترل ۱۰ کاناله ساخت؟!؟!؟
و اینکه رادیو کنترل حداکثر چند کاناله میشه با این ماژول ساخت؟
و این که اون خازن باید چند ولتی باشه؟
با سلام
خیر، نهایتا ۸ کانال میتوانید بسازید. خازن هم ۶ ولتی کافیست.
سلام و خسته نباشید
ببخشید بااین ماژول، رادیو کنترلِ حداکثر چند کاناله میشه ساخت؟!؟!؟
با سلام
نهایتا ۸ کانال
سلام من میخواستم nrf24L0 رو با آدرینو نانو برنامه ریزی کنم ولی موقع پروگرام کردن همش یه ارور مثل اونی که توی انتهای فیلم آموزشی هست میده.
لطفا راهنمایی کنید که جه جوری این مشکل رو درست کنم.
با سلام
متن ارور را همینجا ارسال کنید. تا بررسی کنیم.
سلام
خسته نباشید
من کد رو روی دو تا آردوینو نانو غیر اصل ریختم
یکیشون رو به منبع تغذیه وصل کردم یکی رو به کامپیوتر
ولی اطلاعاتی دریافت نمیکنم
ممکنه راهنماییم کنید
با سلام
ارتباطی با اصل بودن آردوینو یا غیر اصل بودن آن ندارد. بایستی کتابخانه ها و بادریت ها را بررسی کنید.
سلام من انواع مختلف کد ماژول NRF24L01 به برنامه اردوینو دادم این خطا را همیشه میده
Arduino: 1.8.19 (Windows 10), Board: “Arduino Uno”
sketch_sep14a:2:10: fatal error: nRF24L01.h: No such file or directory
#include
^~~~~~~~~~~~
compilation terminated.
exit status 1
nRF24L01.h: No such file or directory
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
این خطا به معنی عدم نصب کتابخانه NRF است. کتابخانه مربوطه را نصب کنید. آموزش زیر میتواند به شما کمک کند.
آموزش نصب کتابخانه آردوینو
سلام
من یک بار با نوع انتن دارش بستم جواب نگرفتم و بدون انتن گرفتم و دوباره جواب نگرفتم تمام سایتا رو زیر و رو کردم جواب نگرفتم ۱ ماهه پاشم خسته شدم چون واسه ماشین کنترلی این پروژه رو میخوام
میشه راه حل بدین
با سلام
کاربر گرامی راه اندازی ماژول NRF بسیار بسیار وابسته به کتابخانه است. بایستی بدانید تراشه ماژولی که خریداری کردید از چه نوعی است و بر اساس آن اقدام کنید.
سلام
من مو به مو کارایی که گفتین هم با فرستنده آنتن دار و هم بدون آنتن امتحان کردم اما عمل نمیکنه
سلام مجدد
مشکل در سازگاری ماژول شما و کتابخانه مورد استفاده است.
فقط خازن برای فرستنده و گیرنده نگذاشتم چون بردم میتونه جریان رو برات فراهم کنه
استفاده از خازن میتونه کمک زیادی به پروژه شما بکنه
سلام وقتتون بخیر.من میخواستم از طریق این ماژول حالت۷کلید رو بصورت ارایه بفرستم برای برد گیرنده که طبق اون ارایه ۷تا رله رو فعال یا غیر فعال کنه.ولی این ارایه در گیرنده بخوبی دریافت نمی شود.میشه راهنماییم کنید مشکل از چی میتونه باشه؟
با سلام
مشکلات از موارد مختلفی میتواند باشد. رنج فرکانسی مورد استفاده را در فرستنده و گیرنده بررسی کنید. همچنین در هر رنج فرکانسی ۶ کانال آدرس دهی در ماژول nRF24 فراهم شده است.
سلام و وقت بخیر.مطالب خیلی خوبی بود.تابع تنظیم توان ورودی رو توضیح می دین؟تابعی که باهاش قدرت سیگنال ورودی رو اندازه بگیریم و اینکه آیا می توان برد nrf را محدود به چند متر کرد؟یعنی فقط در حدود ۷ متر برد داشته باشد.
با سلام
برای این منظور از دستور radio.setPALevel(RF24_PA_HIGH); استفاده کنید. میتوانید از مقادیر RF24_PA_LOW (سطح پایین) یا RF24_PA_MEDIUM (سطح متوسط) هم تنظیم کنید. با این تابع تنظیمات را انجام دهید سپس نتیجه را در ادامه همین کامنت اعلام کنید.