
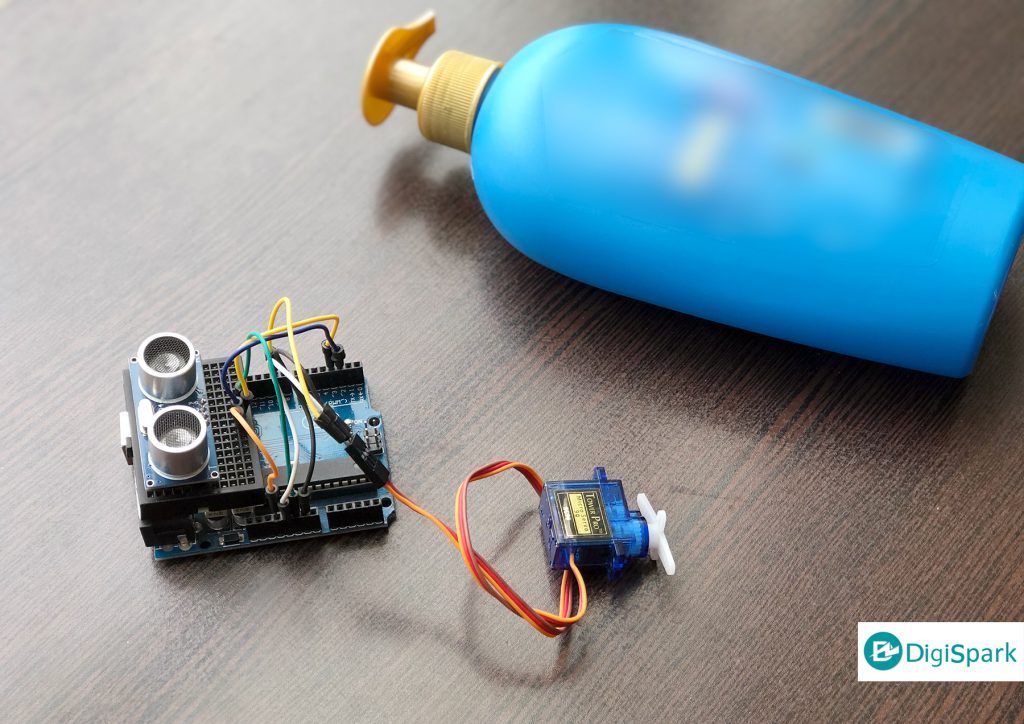
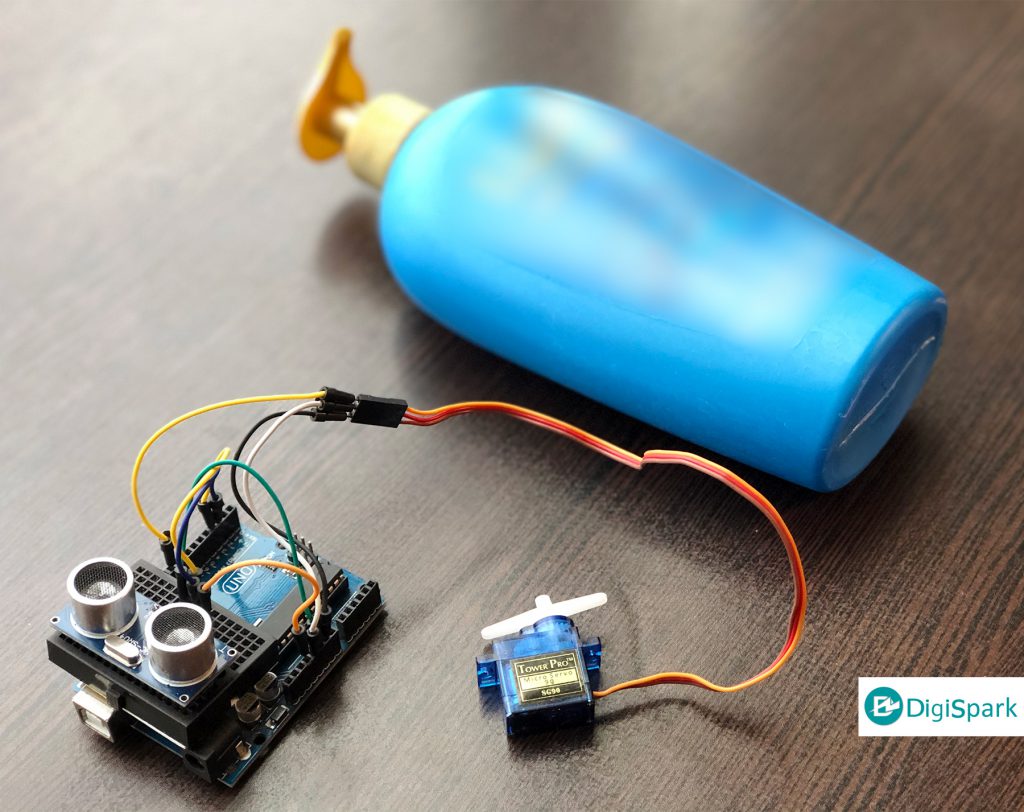
مایع ریز اتوماتیک کیت کرونا با استفاده از آردوینو و دانش برنامه نویسی علاوه بر کم هزینه بودن کمک به رعایت چرخه بهداشت هم کرده است. در این آموزش توسط برد آردوینو و سنسور فاصله سنج مایع دستشویی را مجهز به سیستم تشخیص خواهیم کرد. این روش یکی از ابزارهای کیت کرونا برای ریختن مایع صابون یا مایع ضدعفونی کننده کرونا، بدون تماس دست است. به این صورت که با نزدیک کردن دست به سنسور، توسط سرو موتور شافت مایع دستشویی حرکت داده شده و بدون لمس برای چند ثانیه مایع بر روی دست میریزد. در ادامه با مرجع تخصصی الکترونیک و رباتیک به زبان فارسی، دیجی اسپارک همراه باشید.
برد آردوینو Arduino
برای راه اندازی پروژه مایع ریز اتوماتیک کیت کرونا نیاز به یک میکروکنترلر خواهیم داشت. که در این پروژه جذاب و کاربردی از آردوینو Arduino مدل UNO استفاده خواهیم کرد. آردوینو دارای تراشه Atmega328P است و با در اختیار داشتن پایه های کنترلی آنالوگ و دیجیتال I/O میتوان با سنسورهای مختلف ارتباط برقرار کرد. با در نظر گرفتن پروتکل ارتباطی آن ها را راه اندازی و کدنویسی کرد. محیط برنامه نویسی IDE Arduino است که نباز به دانش برنامه نویسی C++ خواهد داشت. با انتقال کد به محیط برنامه نویسی و کامپایل کد پروژه آماده اجرا خواهد بود. در این پروژه آردوینو از سنسور آلتراسونیک تشخیص به هنگام نزدیک شدن دستهای آلوده، فرمان میگیرد. سپس به سرو موتور جهت فعال شدن و ریختن مایع ضدعفونی کننده و یا صابون فرمان میمیدهد.
سنسور آلتراسونیک SRF
سنسورهای آلتراسونیک با استفاده از امواج صوتی فاصله شی را اندازه گیری میکند. سنسور آلتراسونیک به واسطه یک مبدل پالس ها را ارسال و دریافت میکند تا اطلاعات مربوط به فاصله یک شی را اندازه گیری کرده و ارسال کند. در پروژه مایع ریز اتوماتیک کیت کرونا سنسور آلتراسویک با ارسال موج صوتی، تشخیص دست را داده و مدار کار میکند. مبدل سنسور نقش یک میکروفن جهت دریافت و ارسال موج آلتراسونیک را ایفا میکند. سنسورهایی که در دسترس ما هستند تنها از یک مبدل جهت ارسال پالس و دریافت اکو Echo استفاده میکنند. با اندازه گیری فاصله زمانی بین دریافت و ارسال پالس آلتراسونیک فاصله تا شی مورد نظر را اندازه گیری میکند. از سنسورهای آلتراسونیک در طراحی ربات ها جهت تشخیص مجاورت با شی، تشخیص سطح مانند سطح آب، تشخیص موقعیت و تشخیص فاصله استفاده کرد.
سرو موتور Servo motor
در پروژه مایع ریز اتوماتیک کیت کرونا توسط یک عدد سرو موتور، به مخزن مایع ریز فرمان داده و فرآیند آن انجام میشود. سرو موتور نوعی از موتورهای الکتریکی است که با هدف بکارگیری در سیستمهای کنترل فیدبک طراحی میشود. لختی (اینرسی) در موتور سرو Servo Motor پایین بوده و در نتیجه تغییر سرعت در این موتورها بسیار سریع است. برای مدیریت سرو موتور نیاز به موج مربعی یا PWM است. به عبارت دیگر سرو موتور Servo Motor یک موتور کوچک دارای یک محور یا شافت خروجی است. این محور خروجی قادر است در یک موقعیت و زاویه خاص با سیگنال دریافتی قرار گیرد. در آموزش راه اندازی سرو موتور به سه روش مختلف یاد داده شده است. در صورت نیاز میتوانید از طریق لینک زیر مطالعه کنید.
سه روش راه اندازی سرو موتور servo motor با Arduino آردوینو
کد آردوینو مایع ریز اتوماتیک
کد برنامه مایع ریز اتوماتیک کیت کرونا به زبان ++C در IDE Arduino نوشته شده است. کد را کپی کرده و به محیط برنامه نویسی Arduino انتقال دهید.
#include "Ultrasonic.h" // فراخوانی کتابخانه
#include <Servo.h> // فراخوانی کتابخانه
Ultrasonic ultrasonic(2, 3); // انتخاب پایه تریگر و اکو
Servo myservo; // انتخاب یک متغیر برای سرو موتور
void setup()
{
myservo.attach(9);// انتخاب پایه ۹ برای پایه دیتا سنسور
Serial.begin(9600); // انتخاب باد ریت
}
void loop()
{
float Distance = ultrasonic.read(CM); // دریافت و تشخیص فاصله
Serial.println(Distance); // نمایش فاصله اندازه گیری شده در سریال مانیتور
if (Distance < 10) // در صورتی که فاصله دست تا سنسور ۱۰ سانتی متر و کمتر از آن باشد
{
myservo.write(180); // سرو در زاویه ۱۸۰ درجه شروع به چرخش خواهد کرد
delay(10);
}
else
{
delay(1000);
myservo.write(0); // و پس از ۱۰ میلی ثانیه به زاویه ۰ برمیگردد
}}
اتصالات مایع ریز اتوماتیک
برای ساخت پروژه مایع ریز اتوماتیک کیت کرونا به آردوینو، سرو موتور و فاصله سنج SRF نیاز داریم. همانند زیر اتصالات را انجام دهید. سرو موتور دارای سه سیم نارنجی، قرمز و قهوه ای است که به ترتیب پایه نارنجی پایه دیتا، پایه قرمز تغذیه ۵ولت و پایه قهوه ای پایه GND است:
- سیم دیتا سرو موتور را به پایه دیجیتال شماره ۹ آردوینو Arduino اتصال دهید.
- سیم VCC سرو موتور را به پایه ۵ ولت آردوینو Arduino اتصال دهید.
- سیم GND سرو موتور را به پایه GND آردوینو Arduino اتصال دهید.
سنسور فاصله سنج SRF04 دارای ۴ پایه Trigger, Echo, VCC, GND است.
- پایه Trigger سنسور فاصله سنج را به پایه دیجیتال شماره ۲ آردوینو Arduino اتصال دهید.
- پایه Echo سنسور فاصله سنج را به پایه دیجیتال شماره ۳ آردوینو Arduino اتصال دهید.
- پایه VCC سنسور فاصله سنج را به پایه ۳٫۳ و یا ۵ ولت آردوینو Arduino اتصال دهید.
- پایه GND سنسور فاصله سنج را به پایه GND آردوینو Arduino اتصال دهید.
تحلیل کد مایع ریز اتوماتیک کیت کرونا
مرحله اول، فراخوانی دو کتابخانه Ultrasonic و Servo
- از مسیر Arduino/ Sketch / Include Librray کتابخانه ی Ultrasonic را نصب کنید. کتابخانه سرو موتور به صورت پیش فرض در لیست کتابخانه های نصب شده آردوینو قرار دارد.
انتخاب پایه تریگر و اکو; دو پایه به دلخواه برای تریگر و اکو انتخاب کنید. در این آموزش از پایه ۲ و ۳ دیجیتال آردوینو استفاده شده است.
Ultrasonic ultrasonic(2, 3); // انتخاب پایه تریگر و اکو
انتخاب یک متغیر دلخواه برای سرو
یک متغیر با نام دلخواه جهت فراخوانی سرو موتور تعریف کنید. در این کد از myservo استفاده شده است.
Servo myservo; // انتخاب یک متغیر برای سرو موتور
فراخوانی پایه سرو
از پایه PWM آردوینو جهت اتصال به سرو موتور استفاده کنید. مانند پایه ۹ دیجیتال آردوینو
myservo.attach(9);// انتخاب پایه ۹ برای پایه دیتا سنسور
فرمول محاسبه فاصله با سنسور آلتراسونیک
سرعت صوت ۳۴۳ متر بر ثانیه و یا به عبارتی ۲۹٫۱۵۵ میکرو بر سانتی متر است که با توجه به در نظر گرفتن رفت و برگشت صوت، مدت زمان را بر ۲۹ و سپس بر ۲ تقسیم میشود.
duration/29/2
در این بخش توسط دستور ultrasonic.Ranging فاصله از دستورات تعریف شده در کتابخانه SRF خوانده و به صورت دیتا بر واحد CM ارسال میشود.
float Distance = ultrasonic.Ranging(CM);
شرط گذاری
قرار است با نزدیک شدن دست به سنسور فاصله و تشخیص فاصله تا ۱۰ سانتی متر شافت سرو موتور در زاویه ۱۸۰ درجه چرخش کند. برای اینکار کافیست از دستورات شرطی در زیان برنامه نویسی C++ استفاده کنیم. دستورات شرطی، دستوری را خوانده و در صورت درست بودن آن را اجرا خواهد کرد، حال اگر دستور اجرا نشود خط بعدی اجرا خواهد شد. در این پروژه در صورتیکه فاصله دست تا سنسور ۱۰ سانتی متر و کمتر باشد، شافت سرو موتور از زاویه ۰ به ۱۸۰ درجه چرخش خواهد کرد. پس از گذشت زمان ۱۰ میلی ثانیه شافت سرو به حالت اولیه خود یعنی زاویه ۰ برمیگردد. فاصله با توجه به مکان انتخابی شما میتوان تغییر کند.
if (Distance < 10) // در صورتی که فاصله دست تا سنسور ۱۰ سانتی متر و کمتر از آن باشد
{
myservo.write(180); // سرو در زاویه ۱۸۰ درجه شروع به چرخش خواهد کرد
delay(10);
}
else
{
delay(1000);
myservo.write(0); // و پس از ۱۰ میلی ثانیه به زاویه ۰ برمیگردد
}
وسایل مورد نیاز
آردوینو Arduino UNO به همراه کابل Type B
سنسور فاصله سنج آلتراسونیک Ultrasonic SRF04 و یا SRF05
چسب جهت چسباندن سرو موتور به بدنه مایع دستشویی
چنانچه در مراحل راه اندازی و انجام این پروژه با مشکل مواجه شدید، بدون هیچ نگرانی در انتهای همین پست، به صورت ثبت نظر سوالتان را مطرح کنید. من در سریعترین زمان ممکن پاسخ رفع مشکل شما را خواهم داد. همچنین اگر ایرادی در کدها و یا مراحل اجرایی وجود دارند میتوانید از همین طریق اطلاع رسانی کنید.
در پایان نظرات و پیشنهادات خود را با ما درمیان بگذارید و با اشتراک گذاری این آموزش در شبکه های اجتماعی , از وبسایت دیجی اسپارک حمایت کنید.
سلام
خیلی خیلی ممنونم بابت نوشتن این آموزش، واقعا کاربردی و مناسب این روزهاست
با سلام
از توجه شما ممنونم. امیوارم مفید واقع گردد.
Arduino: 1.8.13 (Windows 8), Board: “Arduino Nano, ATmega328P” با سلام این ارور اذیت می کنه……..من با نانو ریختم
Sketch uses 924 bytes (3%) of program storage space. Maximum is 30720 bytes.
Global variables use 9 bytes (0%) of dynamic memory, leaving 2039 bytes for local variables. Maximum is 2048 bytes.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0x9f
Problem uploading to board. See http://www.arduino.cc/en/Guide/Troubleshooting#upload for suggestions.
Invalid library found in C:\Users\dell-i7\Documents\Arduino\libraries\sketch_mar22a: no headers files (.h) found in C:\Users\dell-i7\Documents\Arduino\libraries\sketch_mar22a
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
این ارور مربوط به عدم شناسایی برد آردوینو است. نوع آردوینو مورد استفاده را بفرمایید تا بررسی شود.
سلام و خسته نباشید
ببخشید من سنسور فاصله سنجی که موجود دارمsrf05هستش مشکلی برا راه اندازی پیش نمیاد
با سلام
تفاوتی ندارد و میتوانید از سنسور SRF05 هم استفاده کنید.
Arduino: 1.8.13 (Windows 8), Board: “Arduino Nano, ATmega328P” با سلام این ارور اذیت می کنه……..
Sketch uses 924 bytes (3%) of program storage space. Maximum is 30720 bytes.
Global variables use 9 bytes (0%) of dynamic memory, leaving 2039 bytes for local variables. Maximum is 2048 bytes.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0x9f
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0x9f
Problem uploading to board. See http://www.arduino.cc/en/Guide/Troubleshooting#upload for suggestions.
Invalid library found in C:\Users\dell-i7\Documents\Arduino\libraries\sketch_mar22a: no headers files (.h) found in C:\Users\dell-i7\Documents\Arduino\libraries\sketch_mar22a
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
این ارور مربوط به عدم شناسایی برد آردوینو است. نوع آردوینو مورد استفاده را بفرمایید تا بررسی شود.
سلام خانم من در اینستاگرم دیدم که از سنسوری مثل ir استفاده شده فرقش چیه
تفاوتش چیه؟ یعنی دقت اونا بالاتره؟
با سلام
این مورد ربطی به دقت اندازه گیری ندارد. هر سنسور دقت اندازه گیری منحصر به خودش را دارد و این مورد در دیتاشیت آن ذکر شده است. در خصوص سنسور IR هم میتوانید از سنسور مورد نظر خود استفاده کنید. تنها کافیست به جای استفاده از کتابخانه Ultrasonic سنسور ir را تعریف و در حلقه Loop همانند همین آموزش با دستور شرطی if else شرط گذاری کنید.
سلام اگر ممکنه این برنامه را بجای سرو موتور با رله بنویسین که موقع تحریک سنسور رله به مدت ۲ الی ۳ ثانیه وصل بشا بعد قطع بشه و نحوه انصال رله به برد اردینو رو توضیح دهید.
با سلام
در این خصوص از طریق پرتال پشتیبانی اقدام فرمایید تا شرایط اجرای پروژه اعلام شود.
پرتال پشتیبانی
درود فراوان اول از همه تشکر میکنم بابت توضیحات خط به خط من از srf05 استفاده میکنم و یه پایه out داره نیازی نداره که ازش برای این کد استفاده بشه؟
با سلام
از توجه شما ممنونم.
خیر نیازی به استفاده و تعریف پایه out در کد برنامه و اتصالات نیست.
سلام
ضمن تشکر از شما آیا امکان استفاده از ال ای دی برای مدت زمان دست شستن برای این کد قابل تعریف است؟ میخواهم ال ای دی ها به مت ۳۰ ثانیه روشن و سپس خاموش شود
با سلام
بله این امکان وجود دارد. تنها کافیست تعداد ال ای دی LED های مورد نظر را در برنامه تعریف کرده و با تابع delay مقدار زمان تاخیر را تعریف کنید و در دستورات if else بعد از انجام هر دستور وارد کنید.
با سلام
آیا امکان خرید یک جای وسایل وجود دارد؟ همچنین ولتاژ مورد نیاز برای کیت چقدر است؟
با سلام
کیت کامل را از طریق لینک زیر میتوانید تهیه نمایید. همچنین ولتاژ آردوینو هم از طریق ۵ ولت USB و هم از طریق باتری و یا آداپتور ۹ ولت قابل تامین است.
من تا حالا ندیدم کسی از کتابخونه برای Srf استفاده کنه آیا همان عملکرد داره
با سلام
لزومی جهت استفاده از کتابخانه Ultrasonic وجود ندارد و در عملکرد آن تاثیری ندارد.
سلام
وقتتون بخیر
سرو موتور باید کجای مایع ریز وصل شه؟؟
با سلام
محل قرار گیری سرو موتور بستگی به روش اتصالات دارد و روند پیچیده ای نخواهد بود. تنها کافیست شافت سرو به گونه ای قرار گیرد که با تغییر زاویه محور مایع دستشویی حرکت کند.
سلام این ارور رو موقع کامپایلینگ گرفتم
Arduino: 1.8.12 (Windows 8.1), Board: “Arduino Uno”
C:\Users\Mr maddah\Documents\ardoyno\soap_pusher\soap_pusher.ino: In function ‘void loop()’:
soap_pusher:18:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
آیا کتابخانه آلتراسونیک را نصب شده است؟ یک تب جداگانه باز کرده و مجدد کد را انتقال دهید. ( نوشته های پیش فرض مانند void setup و viod loop را پاک کنید) نتیجه را از همین طریق اعلام کنید.
سلام بله نصب کردم
باز هم همون ارور رو دریافت کردم
مجدد ارور دریافتی را ضمیمه کنید تا بررسی شود. ممکن است در ورژن های مختلف آردوینو و کتابخانه ها تداخلی صورت گرفته باشد که نیاز به بررسی مجدد دارد.
ranging رو read تغییر دادم درست شد
سلام مجدد
در این خصوص توضیح بیشتری دهید. ورژن کتابخانه ultrasonic و ورژن آردوینو را اعلام فرمایید تا درصورتیکه کاربران دیگر هم به چنین مشکلی برخورد کردند، بتوانند رفع عیب کنند.
بله منم تغییر دادم درست شد
بسیار عالی، از اینکه اطلاع رسانی کردید، بسیار ممنونم.
سلام وقت بخیر
ببخشید از کجا تغییر دادید؟
با سلام
طبق گفته کاربر قبلی، Ranging را به Read تغییر داده اند و مشکل برطرف شده است. بررسی نمایید و نتیجه را از همین طریق اعلام کنید.
سلام بنده کتابخانه هارو نصب کردم ولی پیغام زیر رو میده
‘class UltraSonic’ has no member named ‘ranging’; did you mean ‘sensing’?
با سلام
این ارور مربوط به کتابخانه Ultrasonic است و ممکن است ورژن دانلودی شما همخوانی با این کد نداشته باشد.
ورژن آردوینو مورد استفاده بنده ۱٫۸٫۵ است. از منو manage libraries عبارت Ultrasonic را سرچ کرده و کتابخانهی ultrasonic by erick simoes را نصب کنید.
موارد گفته شده را بررسی و نتیجه را از همین طریق اعلام کنید.
خانم پور بلورچیان عزیز سلام
ممنون بابت اموزش خوبتون بسیار بسیار عالی و کاربردی
سرکار خانم بنده یه جای مایع دستشویی از قبل دارم که تو خودش یه مکنده داره شبیه به واتر پمپ های میناتوری و مایه رو مکش میکنه و از خروجی که یه لوله باشه بیرون میده و در انتهای موتور این مکنده فقط یه سیم مثبت و یه سیم منفی داره حالا سوال بنده از شما خانم محترم این هستش که من میتونم این واتر پمپ رو جایگزین سرو موتور تو این پروژه کنم ایا راهی هست ممنون میشم اگه بنده رو راهنمایی بفرمایین سپاسگذارم
با سلام
از توجه شما ممنونم.
این مورد قابل اجرا است ولی روش راه اندازی با آموزش مربوطه کاملا متفاوت است.
این موتور خیلی ضعیف هست از موتور دیگه میشه استفاده کرد؟ لطفا معرفی کنید و اینکه درایو موتور باید اضافه بشه یا مثل همین موتور متصل میشه؟
سلام
بله سرو موتور با دنده فلزی هم میتوانید استفاده کنید که در این خصوص بایستی ولتاژ کاری سرو موتو را در نظر بگیرید. در صورتیکه ولتاژی بیشتر از ۵ ولت نیاز داشته باشد، امکان استفاده از تغذیه آردوینو وجود ندارد و بایستی از تغذیه جداگانه استفاده کنید. همچنین در صورت استفاده از موتور هم روال کار به همین صورت است تنها بایستی در کدنویسی تغییراتی اعمال شود.
خانم بور بلورچیان سلام خسته نباشین
برای من این ارور رو میده ممنون میشم راهنمایی بفرمایین
Arduino: 1.8.12 (Windows Store 1.8.33.0) (Windows 10), Board: “Arduino Uno”
C:\Users\Hossein\Documents\Arduino\soap\soap.ino: In function ‘void setup()’:
soap:18:6: error: redefinition of ‘void setup()’
void setup()
^~~~~
C:\Users\Hossein\Documents\Arduino\soap\soap.ino:1:6: note: ‘void setup()’ previously defined here
void setup() {
^~~~~
C:\Users\Hossein\Documents\Arduino\soap\soap.ino: In function ‘void loop()’:
soap:25:6: error: redefinition of ‘void loop()’
void loop()
^~~~
C:\Users\Hossein\Documents\Arduino\soap\soap.ino:6:6: note: ‘void loop()’ previously defined here
void loop() {
^~~~
soap:27:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
Multiple libraries were found for “Ultrasonic.h”
Used: C:\Users\Hossein\Documents\Arduino\libraries\Ultrasonic
Not used: C:\Users\Hossein\Documents\Arduino\libraries\Ultrasonic_hc_sr04
exit status 1
redefinition of ‘void setup()’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
ورژن آردوینو مورد استفاده شما ۱٫۸٫۱۲ است و با کتابخانه مورد استفاده تداخل دارد.
در ابتدا از منو manage libraries عبارت Ultrasonic را سرچ کرده و کتابخانهی ultrasonic by erick simoes را نصب کنید. چند ورژن برای کتابخانه معرفی شده است، به ترتیب از آخرین ورژن نصب کرده و تست کنید.
همچنین چند کتابخانه مختلف نصب کرده اید که سبب تداخل در کتابخانه ها شده است. بایستی آن ها را حذف کنید و مجدد فقط یک کتابخانه نصب کنید.
موارد گفته شده را بررسی و نتیجه را از همین طریق اعلام کنید.
سلام خانم پور بلور چیان
بنده دقیقا تمام دستورات شما رو مو به مو اجرا کردم نتیجه این شده
Arduino: 1.8.12 (Windows Store 1.8.33.0) (Windows 10), Board: “Arduino Uno”
C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\arduino-builder -dump-prefs -logger=machine -hardware C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware -tools C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\tools-builder -tools C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -built-in-libraries C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\libraries -libraries C:\Users\Hossein\Documents\Arduino\libraries -fqbn=arduino:avr:uno -ide-version=10812 -build-path C:\Users\Hossein\AppData\Local\Temp\arduino_build_35979 -warnings=none -build-cache C:\Users\Hossein\AppData\Local\Temp\arduino_cache_968597 -prefs=build.warn_data_percentage=75 -prefs=runtime.tools.avr-gcc.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.avr-gcc-7.3.0-atmel3.6.1-arduino5.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.arduinoOTA.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.arduinoOTA-1.3.0.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.avrdude.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.avrdude-6.3.0-arduino17.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -verbose C:\Users\Hossein\Documents\Arduino\sketch_apr13a\sketch_apr13a.ino
C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\arduino-builder -compile -logger=machine -hardware C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware -tools C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\tools-builder -tools C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -built-in-libraries C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\libraries -libraries C:\Users\Hossein\Documents\Arduino\libraries -fqbn=arduino:avr:uno -ide-version=10812 -build-path C:\Users\Hossein\AppData\Local\Temp\arduino_build_35979 -warnings=none -build-cache C:\Users\Hossein\AppData\Local\Temp\arduino_cache_968597 -prefs=build.warn_data_percentage=75 -prefs=runtime.tools.avr-gcc.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.avr-gcc-7.3.0-atmel3.6.1-arduino5.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.arduinoOTA.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.arduinoOTA-1.3.0.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.avrdude.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -prefs=runtime.tools.avrdude-6.3.0-arduino17.path=C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\tools\avr -verbose C:\Users\Hossein\Documents\Arduino\sketch_apr13a\sketch_apr13a.ino
Using board ‘uno’ from platform in folder: C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\arduino\avr
Using core ‘arduino’ from platform in folder: C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\hardware\arduino\avr
Detecting libraries used…
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “C:\\Users\\Hossein\\AppData\\Local\\Temp\\arduino_build_35979\\sketch\\sketch_apr13a.ino.cpp” -o nul
Alternatives for Ultrasonic.h: [Ultrasonic@3.0.0]
ResolveLibrary(Ultrasonic.h)
-> candidates: [Ultrasonic@3.0.0]
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “C:\\Users\\Hossein\\AppData\\Local\\Temp\\arduino_build_35979\\sketch\\sketch_apr13a.ino.cpp” -o nul
Alternatives for Servo.h: [Servo@1.1.6]
ResolveLibrary(Servo.h)
-> candidates: [Servo@1.1.6]
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Users\\Hossein\\AppData\\Local\\Temp\\arduino_build_35979\\sketch\\sketch_apr13a.ino.cpp” -o nul
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src\\Ultrasonic.cpp” -o nul
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src\\avr\\Servo.cpp” -o nul
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src\\mbed\\Servo.cpp” -o nul
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src\\megaavr\\Servo.cpp” -o nul
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src\\nrf52\\Servo.cpp” -o nul
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src\\sam\\Servo.cpp” -o nul
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src\\samd\\Servo.cpp” -o nul
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src\\stm32f4\\Servo.cpp” -o nul
Generating function prototypes…
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Users\\Hossein\\AppData\\Local\\Temp\\arduino_build_35979\\sketch\\sketch_apr13a.ino.cpp” -o “C:\\Users\\Hossein\\AppData\\Local\\Temp\\arduino_build_35979\\preproc\\ctags_target_for_gcc_minus_e.cpp”
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\tools-builder\\ctags\\5.8-arduino11/ctags” -u –language-force=c++ -f – –c++-kinds=svpf –fields=KSTtzns –line-directives “C:\\Users\\Hossein\\AppData\\Local\\Temp\\arduino_build_35979\\preproc\\ctags_target_for_gcc_minus_e.cpp”
Compiling sketch…
“C:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -MMD -flto -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Hossein\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files\\WindowsApps\\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\\libraries\\Servo\\src” “C:\\Users\\Hossein\\AppData\\Local\\Temp\\arduino_build_35979\\sketch\\sketch_apr13a.ino.cpp” -o “C:\\Users\\Hossein\\AppData\\Local\\Temp\\arduino_build_35979\\sketch\\sketch_apr13a.ino.cpp.o”
C:\Users\Hossein\Documents\Arduino\sketch_apr13a\sketch_apr13a.ino: In function ‘void loop()’:
sketch_apr13a:18:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
Using library Ultrasonic at version 3.0.0 in folder: C:\Users\Hossein\Documents\Arduino\libraries\Ultrasonic
Using library Servo at version 1.1.6 in folder: C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.33.0_x86__mdqgnx93n4wtt\libraries\Servo
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging’
با سلام
در ابتدا ورژن آردوینو مورد استفاده را اعلام کنید تا بررسی شود. بایستی کتابخانه Ultrasonic را از مسیر گفته شده دانلود کنید. همچنین در کامنت های قبلی این ارور به روش دیگری توسط یکی از کاربران رفع شده است.
بررسی و موارد را اعلام نمایید.
سلام
با سلام
کاربر گرامی درخواست خود را به صورت شفاف ارسال کنید تا راهنمایی شود.
سلام
برای حل مشکل باید برای خواندن مقدار سنسور از read استفاده کرد.
یه درخواستی هم از خانم بلورچیان داشتم
لطفا در توضیح کد بخش خواندن داده سنسور واژه Ranging را با read جایگزین کنید تا این مشکل دیگر ایجاد نشود
با سلام
با توجه به اینکه آموزش قبل از آپدیت کتابخانه نوشته شده است، این موارد بدیهی است و در کامنت ها به دیگر کاربران راهنمایی کرده ام.
ضمن تشکر از شما این مورد قبلا به روز رسانی شده است.
با سلام و وقت بخیر میشه کد نحوه ساخت با pir رو هم کامل بزارید؟
با تشکر
با سلام
در کامنت ها امکان رسیدگی به این موضوع وجود ندارد. بایستی در کدها سنسور pir را تعریف کرده و در حلقه if else با دستور digitalwrite فرمان High و low ارسال کنید.
سلام
یک سوال داشتم خدمتتون
من میخواهم یک ال ای دی که به مدت ۱ دقیقه روشن بماند رو روی پروژه اضافه کنم منتاها کامپایلر ازم خط دیجیتال وایت رو ایراد میگیره
چرا این مشکل پیش میاد؟
با سلام
ارور را ارسال کنید تا راهنمایی شود.
وقت بخیر این کارو داخل پروتوس انجام دادم و اینکه موتور یک بار چرخش دارد و دیگر انجام نمیشود
سلام
در این خصوص با پروتئوس تست نشده است.
سلام من سخت افزار این پروژه رو انجام دادم اما تو مکانیکش مشکل دارم از چه چسبی استفاده کنم که با حرکت سروو خود موتور از روی بدنه حرکت نکنه؟ ممنون
با سلام
این مورد کاملا مکانیکی است. با استفاده از یک نخ توسط نیروی کششی این کار را میتوانید انجام دهید.
سلام وقت بخیر
برای رفع خطای پایین باید چه کاری انجام بدم؟
Arduino: 1.8.12 (Windows 7), Board: “Arduino Uno”
C:\Users\Alieftekhari\Documents\Arduino\sketch_apr15a\sketch_apr15a.ino: In function ‘void loop()’:
sketch_apr15a:18:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
این ارور مربوط به ورژن آردوینو ۱٫۸٫۱۲ است و با آپدیت کتابخانه Ultrasonic مشکل برطرف خواهد شد. همچنین در همین بخش نظرات کاربران دیگری این مشکل را در ورژن جدید برطرف کرده اند، بررسی نماییدو نتیجه را از همین طریق اعلام کنید.
ایا میتوان بجای آردوینو Arduino Uno R3 میشود از آردوینو UNO مدل CH340 استفاده کرد؟
با سلام
بله تفاوتی ندارد و در تنظیمات هم انتخاب نوع برد یکسان است.
سلام عزیزترینها.
من کیت مایع ریز را خریداری کردم و میخواهم کیت آن را راه اندازی کنم و از نظر برنامه ریزی با کامپیوتر مبتدی هستم لطفا کمک کنید که راه اندازی کنم.
از نظر فیزیکی و مکانیکی میتوانم راه اندازی کنم و برنامه ریزی با کامپیوتر را سردر نیاوردم.
به جای موتور سرور هم میخواهم یک عدد بوبین وصل کنم که از طریق بوبین پمپ شیشه شور ماشین راه اندازی شود یعنی توسط سنسور بوبین تحریک و پمپ فعال شود.
با سلام
در خصوص راه اندازی جهت کدنویسی مراحل شفاف در متن نوشته شده است. در ابتدا کافیست نرم افزار آردوینو را دانلود کرده و کد قرار گرفته شده در متن آموزش را کپی کرده و به نرم افزار انتقال دهید.
همچنین آموزش کار با نرم افزار آردوینو در لینک زیر قرار گرفته شده است، مطالعه کنید.
پس از انتقال کدها، برنامه را Upload کنید. یک به یک پیش بروید و در هر مرحله در صورت ابهام از همین طریق بپرسید تا راهنمایی شود.
ذر خصوص سوال دوم بایستی توضیحات دقیق تری بدهید تا بررسی شود.
سلام
من نوع دیگه ای از سروو روخرید کردم(MG995) و تغذیه ۱۲ ولت هم برای برد انتخاب کردم سیم vcc سروو رو هم به۱۲ ولت و GRD سروو رو به برد اردوینو وصل کردم- زمانی که برد با کابل یو اس بی به کامپیوتر وصل هست و اداپتور ۱۲ ولت هم به برد متصل هست همه چیز درست کار میکنه اما زمانی که برد رو از یو اس بی قطع میکنم و فقط برد و سروو توسط اداپتور ۱۲ ولت متصل هستند سروو با هر چشمک چراغ روی برد حرکت خیلی کوچیکی میکنه و اصلا سنسور هم کار نمیکنه
با سلام
با توجه به توضیحات ارائه شده، به نظر میرسد اتصالات درست است ولی GND سرو موتور و GND آردوینو به تغذیه بایستی متصل باشد. ولتاژ مورد استفاده منقطی نیست و باتوجه به اینکه ولتاژ کاری MG995 طبق دیتاشیت ۴٫۸ تا ۶ ولت است، ممکن است خطا ایجاد کند. موارد را بررسی و نتیجه را اعلام کنید.
ولتاژ رو به ۶ تغییر دادم و GND هم طبق گفته شما هست و درسته ولی باز هم همون مشکل پیش میاد
با سلام
جریان آداپتور مورد استفاده چقدر است؟
سلام عزیزترینها.
من کیت مایع ریز را خریداری کردم و میخواهم کیت آن را راه اندازی کنم و از نظر برنامه ریزی با کامپیوتر مبتدی هستم لطفا کمک کنید که راه اندازی کنم.
از نظر فیزیکی و مکانیکی میتوانم راه اندازی کنم و برنامه ریزی با کامپیوتر را سردر نیاوردم.
به جای موتور سرور هم میخواهم یک عدد بوبین وصل کنم که از طریق یک میکرو رله پمپ شیشه شور ماشین راه اندازی شود یعنی توسط سنسور بوبین تحریک و پمپ فعال شود.
سلام مجدد
کامنت قبلی پاسخ داده شد. موارد را بررسی و نتیجه را اعلام فرمایید.
سلام مجدد
من هرکاری میکنم با کامپیوتر نرم افزار دانلود نمیشود و در نهایت به سایتهای دیگر هدایت میشد.
سلام مجدد
لینک دانلود نرم افزار قرار گرفته شده است، با توجه به نوع ویندوز ورژن مورد نظر را انتخاب و دانلود کنید.
دانلود نرم افزار آردوینو
نتیجه را از همین طریق اعلام کنید.
من دیگه خسته شدم نرم افزار دانلود نمیشه کلافه شد آنقدر کارم واجبه نمیدونستم اینجوری میشه از کار امروز افتادم لطفا لینک واحد پشتیبانی برام بفرستید تا بفرستم زحمتشو شما بکشید.
بسیار مچکرم
از طریق لینک زیر اقدام نمایید.
پرتال پشتیبانی فروشگاه بخش آموزش کار با محصول را انتخاب نمایید.
راهنمای راه اندازی را کامل توضیح دادین و بسیار راحت و آلیه حتی کدهای برنامه نویسی را هم بسیار خوب توضیح دادین ولی نرم افزار قابل دانلود نیست حتی با گوشی هم دانلود کردم انتقال دادم روی لب تاپ بازهم نصب نشد.
مشکل نصب نرم افزار از این طریق قابل پیگیری نمیباشد.
م احل نصب نرم افزار دقیقا مشابه دیگر نرم افزارهای کامپیوتری است و نباید مشکلی وجود داشته باشد. روش نصب را کامل توضیح دهید تا بررسی شود. آیا در لینک ضمیمه شده نوع ویندوز را انتخاب کرده اید؟
سلام وقت بخیر
سرو موتوری که معرفی کردین کاملا مطمنید که قدرت انجام این کار رو داره؟
با سلام
انتخاب سرو موتور کاملا دلخواه است و برای مایع دستشویی های کوچک مناسب است. همچنین در نظر داشته باشید سرو موتورهایی مانند MG995 یا MG996 ولتاژ کاری آن ها متفاوت است و نیاز به تغذیه جداگانه دارد و مستقیم نمیتوانید از طریق آردوینو تغذیه را اعلام کنید.
خرید سرو موتور servo motor
Arduino: 1.8.12 (Windows 8.1), Board: “Arduino Uno”
sketch_apr19b:2:1: error: expected unqualified-id before numeric constant
۱
^
sketch_apr19b:40:1: error: ‘Ultrasonic’ does not name a type; did you mean ‘Ultrasonic_h’?
Ultrasonic ultrasonic(2, 3); // انتخاب پایه تریگر و اکو
^~~~~~~~~~
Ultrasonic_h
C:\Users\Eniac1\Documents\Arduino\sketch_apr19b\sketch_apr19b.ino: In function ‘void loop()’:
sketch_apr19b:55:20: error: ‘ultrasonic’ was not declared in this scope
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~~~~
C:\Users\Eniac1\Documents\Arduino\sketch_apr19b\sketch_apr19b.ino:55:20: note: suggested alternative: ‘Ultrasonic_h’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~~~~
Ultrasonic_h
exit status 1
expected unqualified-id before numeric constant
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
جهت رفع مشکل به جای Ranging در کدنویسی برنامه read را قرار دهید. مشکل برطرف خواهد شد.
این ارور مربوط به آپدیت کتابخانه Ultrasonic است که با تغییر آن مشکل برطرف میشود.
(float Distance = ultrasonic.read(CM;
ممنونم خانم محترم باشخصیت
خواهش میکنم. موفق باشید.
سلام وقتتون بخیر
من کد ها رو نوشتم ولی این خطا رو میده ممنون میشم راهنمایی کنید
class ultasonic has no member named ranging
با سلام
این ارور مربوط به آپدیت کتابخانه Ultrasonic است که با تغییر به صورت زیر مشکل برطرف خواهد شد.
جهت رفع مشکل به جای Ranging در کدنویسی برنامه read را قرار دهید.
(float Distance = ultrasonic.read(CM
عرض سلام وادب…
ببخشید میشه به این چیز های دیگر هم اضافه کرد؟؟؟ مثلا بشه از طریق وب هم کنترلش کرد با ماژول وای فای
با سلام
بله محدودیتی در این خصوص وجود ندارد. از طریق وای فای بلوتوث میتوانید کد را توسعه داده و دیتا ارسال کنید.
سلام
میتونم خواهش کنم نحوه اتصال سروو موتور و این مدار را با ۴relay ماژول بگید به چه صورت هست؟
با سلام
اتصال سرو موتو در متن آموزش نوشته شده است. سرو دارای سه پایه سیگنال با رنک نارنجی و قهوه ای پایه GND و قرمز تغدیه VCC است. پایه سیگنال در این کد پایه شماره ۹ تعریف شده است.
در خصوص رله کافیست در کدها رله را تعریف کرده و پس از خط فرمان رله ها جای گذاری کنید.
void setup() {
pinMode (8,OUTPUT);
}
void loop() {
digitalWrite(8,HIGH);
}
else
{
digitalWrite(8,LOW);
}}
float Distance = ultrasonic.Ranging(CM)
سلام من توی برنامه این خط قرمز میشه مشکل از جی ممنون میشم راهنمایم کنید
با سلام
این ارور مربوط به آپدیت کتابخانه Ultrasonic است که با آپدیت کتابخانه به صورت زیر مشکل برطرف خواهد شد.
جهت رفع مشکل به جای Ranging در کدنویسی برنامه read را قرار دهید.
(float Distance = ultrasonic.read(CM
فیلم آموزش آپلود و نصب کتاب خانه این مدار به اشتراک بزارید
با سلام
تمامی موارد در متن آموزش کامل توضیح داده شده است. همچنین از آموزش زیر هم میتوانید استفاده کنید.
آموزش کار با برد آردوینو Arduino و نصب نرم افزار Arduino IDE
سلام وقت به خیر
ببخشید من کد رو کپی کردم و در آردینو past کردم ولی خطای ”
sketch_apr22a:1:10: fatal error: Ultrasonic.h: No such file or directory
می دهد .
یک مشکل دیگر هم این است که الان این سه سیم سرور موتور که می فرمایید به هم متصل است.چگونه ان را از هم جدا کنم
با سلام
نیازی به جداسازی سیم سروموتورها نیست و بایستی به همین شکل استفاده شود.
همچنین ارور دریافتی مربوط به کتابخانه Ultrasonic است. از منو نرم افزار از بخش Sketch / include libraries را انتخاب کرده و سپس در صفحه باز شده عبارت ultrasonic را سرچ و نصب instal کنید.
سلام
میشه از سرووموتور SG5010 به جای این سروو استفاده کرد یا ولتاژش برای کار با اردویننو مناسب نیست و تغذیه جراگانه میخواد؟
با سلام
ولتاژ کاری سرو موتور SG5010 بین ۴٫۸ تا ۶٫۶ ولت DC است. اگر از تغذیه جداگانه استفاده نکنید، ممکن است جریان SG5010 مانع از رسیدن جریان به برد آردوینو شود و عملکرد صحیحی نداشته باشد.
با سلام چرا مطالب مربوط به ساخت مایع ریز اتوماتیک کیت کرونا در سایت نشان داده نمی شود. وقتی وارد سایت میشویم بنر این آموزش وجود داره هیچ گونه مطلب برای خوندن یا آموزشش نیست پیگیری کنین لطفا. ممنونم.
با سلام
طی بازه ی چند دقیقه ای با اختلال جزیی مواجه بوده ایم. در حال حاضر مشکل برطرف شده است.
سلام آداپتور۵ولت ۲وآمپر به جک آردوینو وصل کنم جواب میده؟
با سلام
خیر ولتاژ کاری آردوینو ۷ تا ۱۲ ولت است که ولتاژ پیشنهادی ۷ تا ۹ ولت میباشد.
سلام متن فارسی داخل کد راهم باید آپلودکنیم یا اول آنرا پاک کنیم .لطفا اگه میشه کدرادرغالب زیپ قراردهید آخه هرچه آپلودمیکنم ارور میده
سوال دیگه التراسونیک وسرورموتور هم جدا باید کد شون راآپلودکنیم
با سلام
کد اصلی در متن آموزش قرار گرفته شده است و کافیست کد را کپی کرده و به نرم افزار آردوینو انتقال دهید. همچنین متن فارسی کامنت شده است و تداخلی در کدها ایجاد نمیکند.
سلام فایل زیپ آلتراسونیک رادانلودکردم ولی نمیدانم چرا وارد کتابخانه نمیشه .قسمت addzip فایل دانلود شده راانتخاب میکنم اما به کتابخانه اضافه نمیشه
با سلام
کدام فایل زیپ را میفرمایید؟
سلام خانم پور بلورچیان .بنده برنامه راکامپایل کردم فقط باراول که فیش آداپتوررابه جک آردوینووصل میکنم سرورموتور۹۰درجه میچرخه وبرمیگرده دیگه کارنمیکنه تا دوباره برق آداپتورراوصل کنم آداپتور۱۲ولت ۱آمپره که مربوط به مودم وای فاست باتشکروآرزوی موفقیت روز افزون برای شما که بدون هیچ چشم داشتی برنامه رادراختیاردوستان قراردادید.
با سلام
ضمن تشکر از شما، ممکن است در اتصالات خطایی داشته باشید، اتصالات را اعلام کنید تا بررسی شود.
سلام پروژه بنده راه اندازی شد فقط با این که سرووموتوردنده فلزی هست مدلmg90sهنوزقدرت کشیدن اهرم مایع دستشویی را نداره
با سلام
در این خصوص بایستی جریان مصرفی سرو موتو را بررسی و تامین کنید. نحوه ی اتصال سرو موتور به آردوینو را بفرمایید.
دقیقا همانطور که خودتون فرمودیدوصل کردم به برد آردوینو
با سلام
بسته به ولتاژ کاری و جریان مصرفی سرو موتور ممکن است به تغذیه جداگانه برای سرو موتور نیاز داشته باشید.
سلام خسته نباشید واقعا ممنونم کارتون درسته . یه سوال داشتم من توی کد اصلی duration/29/2 این رو نمیبینم ولی اینو توی توضیحاتتون آوردین میشه این رو توضیح بدین؟؟ با تشکر فراوان
با سلام
در این کد از کتابخانه Ultrasonic استفاده شده و دستورات محاسبه سرعت صوت و اندازه گیری فاصله در کتابخانه قبلا نوشته شده است. در صورتیکه از کنابخانه استفاده نکنید بایستی در کدها این قسمت اضافه شود. بنابراین جهت توضیح چگونگی اندازه گیری فاصله و یادگیری آن در تحلیل کدها به آن اشاره شده است.
با سلام ممنون بابت ارائه این ایده جالب، من این کیت رو راه اندازی کردم، همه چیش درست کار میکنه، فقط به مشکلی که برخوردم که به هیچ عنوان قابل حل نیست، اونم اینکه این موتور میکرو سرو قدرت و توانایی کافی برای پایین کشیدن اهرم مایع ریز رو نداره، چندین مدل ظرف هم انتخاب کردم، توانایی هیچ کدوم رو نداشت.حالت فنر اهرم ظرف باید خیلی ظریف و نرم باشه که این موتور توانایی جابجایی اون رو داشته باشه، با توجه به ماهیت کاربردی اینگونه ظروف که با فشار دست مایع ازش خارج میشه، غالبا فنر قوی و فشار مضاعف زیادی رو میطلبه که در توانایی این موتور نیست.اگر راهکاری هم سراغ دارین اعلام بفرمایید. سپاس
با سلام
در این خصوص میتوانید از سرو موتورهای دنده فلزی استفاده کنید.
سرو موتور MG995 دنده فلزی ۱۸۰ درجه Tower Pro با مبدل شافت و پیچ و اتصالات
سلام وقتون بخیر ببخشید من از سنسور IR که از سایت خریداری کردم استفاده کردم یک مقدار در مقابل نور و سطح روبروی سنسور حساسه و این که قابل کالیبره کردن با پتانسیومتر پشت سنسور هم نیست آیا التراسونیک نسبت به این مسایل بهتر عمل نمیکنه ؟
با سلام
همانطور که در متن آموزش گفته ام، سنسور آلتراسونیک دارای زاویه دید ۱۵ درجه است و امکان تعریف فاصله قابل تشخیص در کد برنامه وجود دارد و عملکرد دقیق تری خواهد داشت.
سلام و وقت بخیر
من کد را زدم ولی این ارور را نمایش می دهد ابفرمایید مشکل از چیست؟
Build options changed, rebuilding all
C:\Users\Notebook\AppData\Local\Temp\arduino_modified_sketch_544508\Blink.ino:10:25: fatal error: Ultrasonic.h: No such file or directory
#include “Ultrasonic.h”
^
compilation terminated.
exit status 1
Error compiling for board Arduino/Genuino Uno.
این ارور بالا را نمایش می دهد مشکل چیست؟
با سلام
کتابخانه Ultrasonic را از منو Sketch/include libraries دانلود و نصب کنید. مشکل برطرف خواهد شد. در متن آموزش کامل توضیح داده شده است.
سلام و خسته نباشید آیا امکان استفاده از پمپ شناور جهت اسپری به جای سرو موتور وجود دارد؟ باسپاس
با سلام
بله بایستی در کدها یک پایه برای خروجی رله تعریف کرده و سپس با فرمان به رله اینکار را انجام دهید. پمپ به خروجی رله متصل میشود.
سلام وقتتون بخیر
من این ارور رو می گیرم باید چیکارکنم؟
Arduino: 1.8.13 Hourly Build 2020/05/25 05:33 (Windows 10), Board: “Arduino Uno”
C:\Users\surena\Desktop\maye–riz\maye–riz.ino: In function ‘void loop()’:
maye–riz:13:30: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
maye–riz:18:1: error: expected primary-expression before ‘}’ token
}
^
C:\Users\surena\Desktop\maye–riz\maye–riz.ino: At global scope:
maye–riz:19:1: error: ‘myservo’ does not name a type
myservo.write(180); // سرو در زاویه ۱۸۰ درجه شروع به چرخش خواهد کرد
^~~~~~~
maye–riz:21:7: error: expected constructor, destructor, or type conversion before ‘(‘ token
delay(10);
^
maye–riz:23:3: error: expected declaration before ‘}’ token
}
^
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
این ارور مربوط به آپدیت کتابخانه Ultrasonic است. به جای عبارت Ranging عبارت read را جایگزین کنید. مشکل برطرف خواهد شد.
سلام
در این مدار سرو موتور مستقیما به آردوینو متصل میشه ؟
میشه به جای آردوینو یونو از آردوینو نانو استفاده کرد و سرو موتور رو مستقیما به اردوینو نانو وصل کرد ؟
با سلام
بله تفاوتی ندارد.
همش از خط ۱۸ ارور زیر رو میده :
C:\Users\saeed\AppData\Local\Temp\arduino_modified_sketch_554102\sketch_jun12a.ino: In function ‘void loop()’:
sketch_jun12a:18:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
sketch_jun12a:18:39: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~
Multiple libraries were found for “Ultrasonic.h”
Used: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\Ultrasonic_hc_sr04
Not used: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\Grove_Ultrasonic_Ranger
Not used: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\arduino_553414
Using library Ultrasonic_hc_sr04 at version 0.5 in folder: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\Ultrasonic_hc_sr04
Using library Servo at version 1.1.6 in folder: C:\Program Files (x86)\Arduino\libraries\Servo
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging’
دلیلش چیه ؟؟
با سلام
این ارور مربوط به آپدیت کتابخانه Ultrasonic است. کافیست به جای Ranging از read استفاده کنید.
تغییر دادم ولی بازم این خطا رو میده :
C:\Users\saeed\AppData\Local\Temp\arduino_modified_sketch_800212\sketch_jun12a.ino: In function ‘void loop()’:
sketch_jun12a:18:31: error: ‘class Ultrasonic’ has no member named ‘read’
float Distance = ultrasonic.read(CM); // دریافت و تشخیص فاصله
^~~~
Multiple libraries were found for “Ultrasonic.h”
Used: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\Ultrasonic
Not used: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\arduino_553414
Not used: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\Grove_Ultrasonic_Ranger
Not used: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\Ultrasonic_hc_sr04
Not used: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\arduino_89964
Using library Ultrasonic at version 2.1.0 in folder: C:\Users\saeed\OneDrive\Documents\Arduino\libraries\Ultrasonic
Using library Servo at version 1.1.6 in folder: C:\Program Files (x86)\Arduino\libraries\Servo
exit status 1
‘class Ultrasonic’ has no member named ‘read’
سلام مجدد
ارور مربوط به آپدیت کتابخانه Ultrasonic است که با آپدیت کتابخانه به صورت زیر مشکل برطرف خواهد شد.
جهت رفع مشکل به جای Ranging در کدنویسی برنامه read را قرار دهید.
(float Distance = ultrasonic.read(CM
این مشکلو منم دارم read هم میکنم باز ارور میده
با سلام
لطفا موارد را طبق راهنمایی انجام داده و نتیجه را اعلام فرمایید.
سلام من دو تا برنامه مختلف دارم که کارهای مختلفی انجام میدن با سنسور های مختلف و کد مجزا میخوام این دو برنامه همزمان اجرا کنم بصورت جدا اجرا میشن چجوری این دو تا کد اجرا کنم ؟ ادامه کد بعدی قرار بدم؟
با سلام
خیر امکان کامپایل دو کد جداگانه وجود ندارد و در ادامه هم نمیتوانید قرار دهید.
سلام مجدد من اگه دو تا سنسور آلتراسونیک داشته باشم و هر کدام خروجی متفاوتی دارن مثلا یکی سرور موتور حرکت بده و اون یکی ال ای دی روشن کنه چیکار باید کنم تا حالا با دو تا سنسور هم شکل کار نکردم
با سلام
روش راه اندازی به همین صورت است و تنها بایستی کد را تعمیم دهید. هر دو سنسور آلتراسونیک را در کدها تعریف کرده و برای هر یک متغیر جداگانه نسبت داده و سپس برای هر سنسور یک تایع جداگانه مشخص کنید.
با سلام و عرض ادب
نمیدونم این کیت موجود می باشد یا نه ؟
نمیدونم این برنامه نویسی به سیستم کمک میکنه ؟ آیا این سیستم برای راه اندازی باید به اینترنت وصل گردد ؟
همراه: با سپاس
با سلام
بله اقلام کیت به صورت جداگانه بر روی فروشگاه دانشجوکیت موجود است و میتوانید اقدام به خرید نمایید. در خصوص راه اندازی به ارتباط اینترنت نیازی ندارد.
Arduino: 1.8.12 (Windows 8.1), Board: “Arduino Uno”
Sketch uses 4780 bytes (14%) of program storage space. Maximum is 32256 bytes.
Global variables use 252 bytes (12%) of dynamic memory, leaving 1796 bytes for local variables. Maximum is 2048 bytes.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0xe4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0xe4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0xe4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0xe4
Problem uploading to board. See http://www.arduino.cc/en/Guide/Troubleshooting#upload for suggestions.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0xe4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0xe4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0xe4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0xe4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0xe4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0xe4
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
سلام نمیدونم چرا یهو موقع آپلود اررور میده
با سلام
این ارور مربوط به برد آردوینو و بوت لودر آن است.
یلام .برام جای تعجبه که چه جوری این سروموتور میخواد شافت مایع دست شویی رو حرکت بده تا مایع بریزه اگه ممکن هست فیلم خروجی اسن آموزش را بزارید.منظورم ریختن مایع دست شویی توسط سرو موتور
با سلام
در این خصوص تمامی موارد بستگی به نوع اتصالات دارد. همچنین سرو موتور با دنده های فلزی هم مناسب خواهد بود.
سلام برای سنسور sfr05 پایه out را باید چ کرد؟
با سلام
این پایه در این آموزش بدون استفاده است.
سلام
این برد رو آماده دارید برای فروش.
لطفا در صورتی که دارید یا میشناسید با این شماره تماس بگیرید
با سلام
در این خصوص از طریق پرتال پشتیبانی اقدام کنید و با شماره های فروشگاه تماس حاصل نمایید.
دانشجوکیت
این کیت کامل هست برای خرید؟
با سلام
از این لینک زیر جهت خرید اقدام کنید.
کیت چشمی IR FC51 همراه با کاهنده ولتاژ (کیت چشمی مایع ریز کرونا)
میشه فایلکد رو برام بفرستید
با سلام
کاربر گرامی کد برنامه در متن آموزش قرار گرفته شده است.
سلام این اخطار برای چیع
Arduino: 1.8.13 (Windows 7), Board: “Arduino Uno”
Sketch uses 2072 bytes (6%) of program storage space. Maximum is 32256 bytes.
Global variables use 50 bytes (2%) of dynamic memory, leaving 1998 bytes for local variables. Maximum is 2048 bytes.
Serial port not selected.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
پورت سریال شناخته نشده است. از منو tools پورت را انتخاب کنید.
انجام دادم مجددا این پیام اومد
با سلام
چه پیامی ؟
سلام ببخشید من یه سوال داشتم ما اگه بخوایم به جای سرو موتور از پمپ استفاده کنیم یعنی به جای این که سرو موتور بهچرخه پمپ اب رو بکشه امکانش هست ممنون میشم توضیحی بدیین
با سلام
بایستی در کد برنامه یک پایه دیجیتال برای رله تعریف کنید. سپس شرایط High , low شدن را برای خروجی رله در نظر بگیرید. سپس پمپ را به رله متصل کنید.
ماژول فرستنده گیرنده مادون قرمز
با سلام
کاربر گرامی لطفا درخواست خود را شفاف ارسال کنید تا راهنمایی شود.
ببخشید چطور میشه بجای سرو موتور یه پمپ وصل کنیم
با سلام
بایستی در کد برنامه یک پایه دیجیتال تعریف کنید و سپس شرایط LOW, HIGH را برای خروجی رله تعریف کنید و پمپ را به رله متصل کنید.
سلام ببخشید امکانش نیست که از پمپ استفاده منیم از چه کدی؟
با سلام
در این خصوص منتظر به روز رسانی این آموزش باشید.
من الان رفتم تو برنامه و قسمت پورت کم رنگ هستش و وقتی روش کلیک می کنم اتفاقی نمی افته.یه سرچ کردم فهمیدم باید کابل رو به کامپیوتر بشناسونم اما ویندوز کامپیوترم ۷. ۳۲ بیتی هستش و داخلش هم port رو نتونستم پیدا کنم
با سلام
عدم شناسایی پورت به معنی شناخته نشدن برد آردوینو در سیستم است. مدل آردوینو مورد استفاده را اعلام کنید تا بررسی شود.
سلام
لطفا با من تماس بگیری
با سلام
کاربر گرامی از طریق بخش دیدگاه ها میتوانید در ارتباط باشید. در حال حاضر تنها راه ارتباط از همین طریق است.
سلام خسته نباشید میشه بجای سرورموتور از پمپ آبdc استفاده کرد چگونه
با سلام
بله کافی است در کدها یک پایه دیجیتال تعریف کرده و سپس از یک رله استفاده کنید.
سلام ممنون از اموزش هاتون کاش به جز زمان مطالعه یه مورد سطح دشواری هم برای پروژه ها بگذارید مخصوصا برای تازه کار ها مثل من میتونه خیلی کمک کننده باشه تا از پروژه های اسون تر استفاده کنند
با سلام
از توجه شما ممنونم. امیدوارم مفید واقع شود.
سلام این ارور چجوری حل کنم
Arduino: 1.8.10 (Windows 10), Board: “Arduino/Genuino Uno”
sketch_oct03a:1:10: error: Ultrasonic.h: No such file or directory
#include “Ultrasonic.h” // فراخوانی کتابخانه
^~~~~~~~~~~~~~
compilation terminated.
exit status 1
Ultrasonic.h: No such file or directory
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
کتابخانه ultrasonic.h نصب و آپدیت کنید.
خیلی دیر جواب میدید لطفا جپاب سوال منو بدید من ارورقبلی رو حل کردم
کاربر گرامی تعداد سوال ها بسیار زیاد است و به اولویت ارسال پاسخ داده خواهد شد.
این ارور چجوری درست میشه
Arduino: 1.8.10 (Windows 10), Board: “Arduino/Genuino Uno”
C:\Users\ehsan\Desktop\sketch_oct03a\sketch_oct03a.ino: In function ‘void loop()’:
sketch_oct03a:18:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
sketch_oct03a:18:39: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~
Multiple libraries were found for “Ultrasonic.h”
Used: C:\Users\ehsan\Documents\Arduino\libraries\Ultrasonic_hc_sr04
Multiple libraries were found for “Servo.h”
Used: C:\Program
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
همانطور که اعلام شد شما چندین کتابخانه نصب کرده اید که سبب ایجاد تداخل شده است. آن ها را حذف کرده و طبق آموزش کتابخانه های مورد نیاز را نصب کنید.
سلام ارور داد ranging بعد عوض کردم read کردم باز ارور داد
Arduino: 1.8.10 (Windows 10), Board: “Arduino/Genuino Uno”
C:\Users\ehsan\AppData\Local\Temp\arduino_modified_sketch_988655\sketch_oct04a.ino: In function ‘void loop()’:
sketch_oct04a:20:31: error: ‘class Ultrasonic’ has no member named ‘Read’
float Distance = ultrasonic.Read(CM); // دریافت و تشخیص فاصله
^~~~
sketch_oct04a:20:36: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.Read(CM); // دریافت و تشخیص فاصله
^~
Multiple libraries were found for “Servo.h”
Used: C:\Program
Multiple libraries were found for “Ultrasonic.h”
Used: C:\Users\ehsan\Documents\Arduino\libraries\Ultrasonic_hc_sr04
exit status 1
‘class Ultrasonic’ has no member named ‘Read’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
سلام
ارورها مربوط به نصب چندین کتابخانه مختلف است. در این آموزش فقط به کتابخانه Servo , ultrasonic نیاز داریم. کتابخانه های اضافی را پاک کنید. مشکل برطرف خواهد شد.
چجوری باید پاکش کنم کتابخونه ها رو
با سلام
در مسیر نصب فایل آردوینو خود رفته و در پوشه Arduino/ Library میتوانید کتابخانه های اضافی را حذف کنید.
Arduino: 1.8.10 (Windows 10), Board: “Arduino/Genuino Uno”
C:\Users\ehsan\Documents\Arduino\sketch_oct05a\sketch_oct05a.ino: In function ‘void loop()’:
sketch_oct05a:18:31: error: ‘class Ultrasonic’ has no member named ‘Read’
float Distance = ultrasonic.Read(CM); // دریافت و تشخیص فاصله
^~~~
sketch_oct05a:18:36: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.Read(CM); // دریافت و تشخیص فاصله
^~
Multiple libraries were found for “Ultrasonic.h”
Used: C:\Users\ehsan\Documents\Arduino\libraries\Ultrasonic_hc_sr04
Multiple libraries were found for “Servo.h”
Used: C:\Program
exit status 1
‘class Ultrasonic’ has no member named ‘Read’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
همه کتابخونه هارو پاک کردم فقط موند التراسونیک و سرو ولی بازم این ارور داد
با سلام
Multiple libraries were found for “Ultrasonic.h”
ارور دریافتی شما به این صورت است و نوشته شده است که چندین کتابخانه که سبب ایجاد تداخل شده است. نصب شده است.
شما فقط بایستی کتابخانه زیر را نصب کنید. کتابخانه سرو به صورت پیش فرض است.
ultrasonic by Eric simoes Version 3.0.0
همچنین شما کد را به درستی انتقال نداده اید و ارورهای نوشتاری به وجود آمده است.
Arduino: 1.8.10 (Windows 10), Board: “Arduino/Genuino Uno”
C:\Users\ehsan\Documents\Arduino\sketch_oct05a\sketch_oct05a.ino: In function ‘void loop()’:
sketch_oct05a:18:31: error: ‘class Ultrasonic’ has no member named ‘Read’
float Distance = ultrasonic.Read(CM); // دریافت و تشخیص فاصله
^~~~
sketch_oct05a:18:36: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.Read(CM); // دریافت و تشخیص فاصله
^~
Multiple libraries were found for “Servo.h”
Used: C:\Program
Multiple libraries were found for “Ultrasonic.h”
Used: C:\Users\ehsan\Documents\Arduino\libraries\Ultrasonic_hc_sr04
exit status 1
‘class Ultrasonic’ has no member named ‘Read’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
ببخشید همونطور که گفتید من همه کتابخونه هارو پاک کردم فقط موند التراسونیک و سرو بعدranging رو read تغییر دادم بازم این ارور بالایی رو داد
کپی رو هم کاملا ساده با ctrl c و ctrl v انجام دادم
بنده با توجه به اروری که ضمیمه شده است، موارد را اعلام میکنم. در این ارور مجدد پیام نصب چندین کتابخانه مختلف نمایش داده شده است.
در ابتدا یک تب جدید در آردوینو باز کنید.
کد را مجدد کپی کنید.
نیازی به نصب هیچ کتابخانه سرو نیست، زیرا این کتابخانه به صورت پیش فرض نصب است.
از منو tools/ manage libraries را انتخاب کنید و سپس عبارت Ultrasonic را سرچ کنید. کتابخانه ای که توسط ultrasonic by Eric simoes Version توسعه یافته است را نصب کنید.
سپس از سیتسم خود وارد پوشه آردوینو شده و در پوشه library مطمئن شوید که کتابخانه دیگری برای آلتراسونیک نصب نیست.
بدون شک با اجرای این موارد نباید با اروری مواجه شوید. بررسی و نتیجه را اعلام کنید.
ببخشید خسته نباشید مشکلایی که گفتید رو رفع کردم الان موقع آپلود این ارور میده
Arduino: 1.8.10 (Windows 10), Board: “Arduino/Genuino Uno”
Sketch uses 4780 bytes (14%) of program storage space. Maximum is 32256 bytes.
Global variables use 252 bytes (12%) of dynamic memory, leaving 1796 bytes for local variables. Maximum is 2048 bytes.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x24
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0x24
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x24
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0x24
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0x24
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0x24
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0x24
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0x24
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0x24
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0x24
Problem uploading to board. See http://www.arduino.cc/en/Guide/Troubleshooting#upload for suggestions.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
این ارور مربوط به عدم شناخته شدن برد آردوینو است و ارتباطی با کد ندارد. پورت usb و نوع برد را از منو Tools به درستی انتخاب کنید.
Arduino: 1.8.10 (Windows 10), Board: “Arduino/Genuino Uno”
Sketch uses 4780 bytes (14%) of program storage space. Maximum is 32256 bytes.
Global variables use 252 bytes (12%) of dynamic memory, leaving 1796 bytes for local variables. Maximum is 2048 bytes.
An error occurred while uploading the sketch
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0x03
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
این ارور داد چجوری باید حلش کنم
ارور مربوط به برد آردینو و شناخته نشدن برد است. مواردی از جمله کابل ، نوع برد و پورت را بررسی کنید.
ببخشید یه مشکلی هست من ۲ تا پورت ۵ولت نیاز دارم ولی آردوینو یکی داره پون التراسونیک من وصل میکنم به ۳٫۳ کار نمیکنه و سرو هم به ۵ ولت وصله میخوام هردو به ۵ وصل بشه چون سرو به ۳٫۳ وصل میکنم سرعتش خیلی کم میشه
با سلام
کافیست اشتراک بین سیم ها گرفته و به پایه ۵ ولت اتصال دهید.
ببخشید یکیم اینکه من میتونم ۲تا سرو موتور تو این کار استفاده کنم؟ چجوری لطفا توضیح بدید اگه ممکنه
با سلام
بله در این کد یک متغیر با نام myservo تعریف شده است. کافیست کد را ارتقا دهید و یک متغیر دیگر مثلا myservo2 تعریف کرده و تمامی دستورات حلقه را برای myservo2 هم بنویسید.
ببخشید اینو میشه با آداپتور ۹ ولت راه اندازی کرد بجای باتری؟اگه میشه با آداپتور ۹ ولت چند آمپر؟
سلام
بله از آداپتور ۹ ولت ۱ آمپر میتوانید استفاده کنید.
خرید آداپتور ۹ ولت ۱ آمپر
از nano هم میشود استفاده کرد؟
با سلام
بله تفاوتی در نوع برد مورد استفاده ندارد.
ببخشید خانم بلورچیان من از شما پرسیدم ۲تا سرو موتورو چجوری راه اندازی کنم شما گفتید ولی من هیچ چیزی سردرنمیارم ممکن نیست کدنویسی اونو برای من ارسال کنید قدرت یه سرو موتور اصلا نمیرسه به تکون دادن پمپ
با سلام
کاربر گرامی امکان ارائه کد در کامنت ها نیست. جهت استفاده از پمپ بایستی از رله استفاده کنید که در آموزش زیر توضیح داده شده است.
آموزش ساخت مایع ریز کرونا اتوماتیک با پمپ و آردوینو Arduino
منظورم از پمپ منظور سری مایع ریز که سرو موتور فشار میده هست لطفا اگه ممکنه تو اینستاگرام پیجتونو دارم کدو ارسال کنید اگه نه که ایمیل بدم ایمیل کنید اگه نه حداقل راهنمایی کنید چیکار کنم چون یه سرو موتور کاملا بیهودس بدرد نمیخوره
با سلام
کاربر گرامی در خصوص اجرای پروژه میتوانید درخواست خود را از طریق پرتال پشیتبانی فروشگاه ارسال کنید تا هزینه برنامه نویسی اعلام شود. همچنین بایستی از سرو موتورهای دنده فلزی با توان بالاتر استفاده کنید.
خانم بلورچیان الان این یه سرو موتور زورش به مایع ریز نمیرسه،راه حلش چبیه لطفا راهنمایی کنید
با سلام
در این خصوص میتوانید از سروموتورها با توان بالاتر استفاده کنید.
سلام خانوم پوربلورچیان برای این کار من ۲تا از این سرو موتور آبیا استفاده کردم ولی خیلی ضعیفن زورشون نمیرسه،سرو موتور قوی چی میتونم استفاده کنم؟این سرو موتور های ۲۷۰یا ۳۶۰درچه برای این کار قابل کد نویسی هست؟
در نظر داشته باشید سرو موتورهای ۱۸۰ درجه زاویه پذیر است و از مدل ۳۶۰ درجه برای این پروژه نمیتوانید استفاده کنید.
سرو موتور قوی شما چی پیشنهاد میکنید
با سلام
از سرو موتورهای دنده فلزی با گشتاور ۱۰ کیلوگرم میتوانید استفاده کنید. در نظر داشته باشید سرو حتما بایستی ۱۸۰ درجه باشد.
خرید سرو موتور
سلام ببخشید سرو موتور mg996 توان چند کیلو گرمه؟تو اطلاعات محصول ننوشته
با سلام
طبق اطلاعات گفته شده در دیتاشیت گشتاور موتور ۱۱ کیلوگرم بر سانتی متر است.
Arduino: 1.8.13 (Windows 7), Board: “Arduino Uno”
C:\Users\MILAD-~1\AppData\Local\Temp\arduino_modified_sketch_765757\Blink.ino: In function ‘void loop()’:
Blink:18:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
لطفا کتابخانه را آپدیت کنید.
Arduino: 1.8.10 (Windows 10), Board: “Arduino Uno”
Sketch uses 4780 bytes (14%) of program storage space. Maximum is 32256 bytes.
Global variables use 252 bytes (12%) of dynamic memory, leaving 1796 bytes for local variables. Maximum is 2048 bytes.
An error occurred while uploading the sketch
avrdude: ser_drain(): read error: The device does not recognize the command.
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_drain(): read error: The device does not recognize the command.
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_drain(): read error: The device does not recognize the command.
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0xe8
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0xe8
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0xe8
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0xe8
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0xe8
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0xe8
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0xe8
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0xe8
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0xe8
avrdude: ser_send(): write error: sorry no info avail
avrdude: ser_recv(): read error: The device does not recognize the command.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0xe8
avrdude: ser_drain(): read error: The device does not recognize the command.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
خسته نباشید این ارور چیه
با سلام
این ارور مربوط به عدم شناخته شدن برد آردوینو است. با توجه به اینکه در ارورهای قبلی این مورد وجود نداشته است، ممکن است تنظیمات برد را اشتباه انتخاب کرده و یا به برد آسیب رسانده اید.
سلام این eror مربوط به چه چیزی هست
Arduino: 1.8.12 (Windows 10), Board: “Arduino Uno”
C:\Program Files (x86)\Arduino\arduino-builder -dump-prefs -logger=machine -hardware C:\Program Files (x86)\Arduino\hardware -tools C:\Program Files (x86)\Arduino\tools-builder -tools C:\Program Files (x86)\Arduino\hardware\tools\avr -built-in-libraries C:\Program Files (x86)\Arduino\libraries -libraries C:\Users\Mohammad Mahdi\Documents\Arduino\libraries -fqbn=arduino:avr:uno -ide-version=10812 -build-path C:\Users\MOHAMM~1\AppData\Local\Temp\arduino_build_722447 -warnings=none -build-cache C:\Users\MOHAMM~1\AppData\Local\Temp\arduino_cache_704945 -prefs=build.warn_data_percentage=75 -prefs=runtime.tools.avr-gcc.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.avr-gcc-7.3.0-atmel3.6.1-arduino5.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.avrdude.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.avrdude-6.3.0-arduino17.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.arduinoOTA.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.arduinoOTA-1.3.0.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -verbose C:\Users\Mohammad Mahdi\Desktop\barname nevicy\ardnuo projkt\zed ofony\Zed_ofoony\Zed_ofoony.ino
C:\Program Files (x86)\Arduino\arduino-builder -compile -logger=machine -hardware C:\Program Files (x86)\Arduino\hardware -tools C:\Program Files (x86)\Arduino\tools-builder -tools C:\Program Files (x86)\Arduino\hardware\tools\avr -built-in-libraries C:\Program Files (x86)\Arduino\libraries -libraries C:\Users\Mohammad Mahdi\Documents\Arduino\libraries -fqbn=arduino:avr:uno -ide-version=10812 -build-path C:\Users\MOHAMM~1\AppData\Local\Temp\arduino_build_722447 -warnings=none -build-cache C:\Users\MOHAMM~1\AppData\Local\Temp\arduino_cache_704945 -prefs=build.warn_data_percentage=75 -prefs=runtime.tools.avr-gcc.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.avr-gcc-7.3.0-atmel3.6.1-arduino5.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.avrdude.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.avrdude-6.3.0-arduino17.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.arduinoOTA.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -prefs=runtime.tools.arduinoOTA-1.3.0.path=C:\Program Files (x86)\Arduino\hardware\tools\avr -verbose C:\Users\Mohammad Mahdi\Desktop\barname nevicy\ardnuo projkt\zed ofony\Zed_ofoony\Zed_ofoony.ino
Using board ‘uno’ from platform in folder: C:\Program Files (x86)\Arduino\hardware\arduino\avr
Using core ‘arduino’ from platform in folder: C:\Program Files (x86)\Arduino\hardware\arduino\avr
Detecting libraries used…
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “C:\\Users\\MOHAMM~1\\AppData\\Local\\Temp\\arduino_build_722447\\sketch\\Zed_ofoony.ino.cpp” -o nul
Alternatives for Ultrasonic.h: [Ultrasonic@3.0.0 Ultrasonic_hc_sr04@0.5 Grove_Ultrasonic_Ranger@1.0.1]
ResolveLibrary(Ultrasonic.h)
-> candidates: [Ultrasonic@3.0.0 Ultrasonic_hc_sr04@0.5 Grove_Ultrasonic_Ranger@1.0.1]
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “C:\\Users\\MOHAMM~1\\AppData\\Local\\Temp\\arduino_build_722447\\sketch\\Zed_ofoony.ino.cpp” -o nul
Alternatives for Servo.h: [Servo@1.1.6]
ResolveLibrary(Servo.h)
-> candidates: [Servo@1.1.6]
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Users\\MOHAMM~1\\AppData\\Local\\Temp\\arduino_build_722447\\sketch\\Zed_ofoony.ino.cpp” -o nul
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src\\Ultrasonic.cpp” -o nul
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src\\avr\\Servo.cpp” -o nul
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src\\mbed\\Servo.cpp” -o nul
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src\\megaavr\\Servo.cpp” -o nul
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src\\nrf52\\Servo.cpp” -o nul
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src\\sam\\Servo.cpp” -o nul
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src\\samd\\Servo.cpp” -o nul
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src\\stm32f4\\Servo.cpp” -o nul
Generating function prototypes…
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -flto -w -x c++ -E -CC -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Users\\MOHAMM~1\\AppData\\Local\\Temp\\arduino_build_722447\\sketch\\Zed_ofoony.ino.cpp” -o “C:\\Users\\MOHAMM~1\\AppData\\Local\\Temp\\arduino_build_722447\\preproc\\ctags_target_for_gcc_minus_e.cpp”
“C:\\Program Files (x86)\\Arduino\\tools-builder\\ctags\\5.8-arduino11/ctags” -u –language-force=c++ -f – –c++-kinds=svpf –fields=KSTtzns –line-directives “C:\\Users\\MOHAMM~1\\AppData\\Local\\Temp\\arduino_build_722447\\preproc\\ctags_target_for_gcc_minus_e.cpp”
Compiling sketch…
“C:\\Program Files (x86)\\Arduino\\hardware\\tools\\avr/bin/avr-g++” -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -MMD -flto -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10812 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\cores\\arduino” “-IC:\\Program Files (x86)\\Arduino\\hardware\\arduino\\avr\\variants\\standard” “-IC:\\Users\\Mohammad Mahdi\\Documents\\Arduino\\libraries\\Ultrasonic\\src” “-IC:\\Program Files (x86)\\Arduino\\libraries\\Servo\\src” “C:\\Users\\MOHAMM~1\\AppData\\Local\\Temp\\arduino_build_722447\\sketch\\Zed_ofoony.ino.cpp” -o “C:\\Users\\MOHAMM~1\\AppData\\Local\\Temp\\arduino_build_722447\\sketch\\Zed_ofoony.ino.cpp.o”
C:\Users\Mohammad Mahdi\Desktop\barname nevicy\ardnuo projkt\zed ofony\Zed_ofoony\Zed_ofoony.ino: In function ‘void loop()’:
Zed_ofoony:18:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
Multiple libraries were found for “Ultrasonic.h”
Used: C:\Users\Mohammad Mahdi\Documents\Arduino\libraries\Ultrasonic
Not used: C:\Users\Mohammad Mahdi\Documents\Arduino\libraries\Ultrasonic_hc_sr04
Not used: C:\Users\Mohammad Mahdi\Documents\Arduino\libraries\Grove_Ultrasonic_Ranger
Using library Ultrasonic at version 3.0.0 in folder: C:\Users\Mohammad Mahdi\Documents\Arduino\libraries\Ultrasonic
Using library Servo at version 1.1.6 in folder: C:\Program Files (x86)\Arduino\libraries\Servo
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging’
با سلام
به نظر میرسد هیچ یک از مراحل گفته شده را به درستی انجام نداده اید. در ابتدا فقط و فقط کتابخانه های گفته شده را نصب کنید و بایستی کتابخانه های اضافی را از مسیر Arduino / library در سیستم خود پاک کنید.
سپس نوع برد آردوینو مورد استفاده و پورت را مشخص کنید.
سلام
ممنون از راهنمایی شما
یک سوال وقتی من نام کتاب خانه رو تو پنجره کتاب خانه ها سرچ میکنم تعداد زیادی کتابخانه میاد و من نمیدونم کدوم رو باید نصب کنم
ممنون میشم راهنمایی کنید
اگه ممکنه به ایمیل
برای راهنمایی بیشتر عکس بفرستید
باتشکر
با سلام
کاربر گرامی در متن آموزش کتابخانه مورد استفاده کامل نوشته شده است.
کنابخانه ultrasonic erick simoes را نصب کنید.
همچنین در نظر داشته باشید تمامی موارد فقط از طریق سایت قابل پیگیری است و از ارسال ایمیل خود به شدت پرهیز کنید.
سلام
یک سوال
تو نرم افزار Fritzing میشه مداری که طراحی کردیم رو اجرا کنیم
من تو قسمت code کد های این پروژه رو کپی کردم و به Fritzing انتقال دادم ولی یک ارور
داد
no uploader for arduino specified. Go. to preferences > code view to configure it.
نمیدونم از چیه
آیا تو Fritzing به برد آردینو هم کابل وصل میکنیم ؟
اگه باید وصل کنیم احتمال میدم از اون باشه چون من کابل برد آردینو رو تو نرم افزار پیدا نکردم
اگه بود اسمش رو بگید
باتشکر
با سلام
جهت آپلود برنامه از نرم افزار آردوینو استفاده کنید.
سلام
میخواستم تو نرم افزار فریتزینگ شبیه سازی این پروژه رو اجرا کنم
آیا میشه؟
آیا درپرژه های دیگر هم میشه؟
با تشکر از سایت خوب شما
سلام
کاربر گرامی از fritzing برای کشیدن طرح برنامه استفاده میشود. بایستی برنامه را در نرم افزار آردوینو Arduinp اجرا کنید.
سلام
میخواستم تو نرم افزار فریتزینگ شبیه سازی این پروژه رو اجرا کنم …………
آیا میشه؟……….
آیا درپرژه های دیگر هم میشه؟………………
با تشکر از سایت خوب شما…………
سلام
کاربر گرامی از fritzing برای کشیدن طرح برنامه استفاده میشود. بایستی برنامه را در نرم افزار آردوینو Arduinp اجرا کنید.
سلام خانم پوربلورچیان
من هر چقدر کد رو وارد میکم شرط if رو خطا میده
این هم کد خطا
Arduino: 1.8.5 (Windows 10), Board: “Arduino/Genuino Uno”
sketch_nov08a:41: error: expected unqualified-id before ‘if’
if (Distance Preferences.
الان باید چیکار کنم درسا بشه ؟؟؟
سلام
کد صحیح وارد نشده است. از نوار سمت راست بالای کد ابتدا کد را کپی و سپس با کلیدهای میانبر انتقال دهید.
سلام خیلی ممنونم از این آموزش
چطوری سر هم بکنیم روی بدنه
با سلام
این مورد بر عهده خودتان میباشد.
سلام خیلی ممنونم از این آموزش
چگونه کار های بدنه رو انجام دهیم
با سلام
این مورد بر عهده خودتان میباشد.
سلام خیلی ممنونم از این آموزش
چگونه بر روی مایع ریز بچسبونیم
با سلام
این مورد بر عهده خودتان میباشد.
سلام این ارور یعنی چه
C:\Users\LENOVO\Desktop\Kharazmi_robot_automatic_micro_liquid\Kharazmi_robot_automatic_micro_liquid.ino: In function ‘void loop()’:
Kharazmi_robot_automatic_micro_liquid:18:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~~~~~
Kharazmi_robot_automatic_micro_liquid:18:39: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging
با سلام
با توجه به اینکه این کتابخانه آپدیت شده است. تغییراتی در برنامه نویسی وجود دارد که در حال حاضر اصلاح شده است.
به جای عبارت Rangingدر برنامه Read را وارد کنید.
این ارور یعنی چه
C:\Users\LENOVO\Desktop\Kharazmi_robot_automatic_micro_liquid\Kharazmi_robot_automatic_micro_liquid.ino: In function ‘void loop()’:
Kharazmi_robot_automatic_micro_liquid:18:31: error: ‘class Ultrasonic’ has no member named ‘Ranging’
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~~
Kharazmi_robot_automatic_micro_liquid:18:39: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.Ranging(CM); // دریافت و تشخیص فاصله
^~
exit status 1
‘class Ultrasonic’ has no member named ‘Ranging
با سلام
با توجه به اینکه این کتابخانه آپدیت شده است. تغییراتی در برنامه نویسی وجود دارد که در حال حاضر اصلاح شده است.
به جای عبارت Rangingدر برنامه Read را وارد کنید.
سلام این ارور یعنی چه
Alternatives for Ultrasonic.h: []
Kharazmi_robot_obstructs_detection:3:10: fatal error: Ultrasonic.h: No such file or directory
ResolveLibrary(Ultrasonic.h) #include “Ultrasonic.h” // فراخوانی کتابخانه
^~~~~~~~~~~~~~
-> candidates: []compilation terminated.
Using library HC-SR04 at version 1.0.2 in folder: C:\Users\LENOVO\Documents\Arduino\libraries\HC-SR04
exit status 1
Ultrasonic.h: No such file or directory
با سلام
کتابخانه Ultrasonic را نصب کنید.
سلام ببخشید من توی این پروژه یک اشتباهی رو کردم به جای اینکه سیم vcc سروو موتور رو به ۵ولت و gndرو به پین gnd متصل کنم بر عکس انجام دادم یعنی vcc رو به gnd و gnd رو ۵ولت متصل کردم نیخواست بدونم اردوینو سالمه و میکرو کنترل
با سلام
در صورت اتصال لحظه ای مشکلی ایجاد نمیشود. سرو موتور و آردوینو را تست کنید.
سلام ببخشید من یک توی این پروژه. طی یک سیم بندی اشتباه به جای اینکه سیم vcc سروو موتور رو به ۵ولت متصل کنم به gnd متصل کردم و سیم gndسرو رو به جای اینکه به gndمتصل کنم به ۵ولت متصل کردم ایا مشکلی برای اردوینو و سروو پیش میاد
با سلام
در صورت اتصال لحظه ای مشکلی به وجود نمیآید.
سلام و خسته نباشید به شما
واسه ساختن این پروژه چند تا سوال داشتم
۱ _ سرو مورد استفاده از کدوم نوع باشه ، ۱۸۰ درجه یا ۳۶۰ درجه ؟
یا فرقی نداری ، اگه فرق داره و میشه کد هاش رو هم بگین
۲ _ اردینو مورد استفاده اگه از نوع نانو باشه ، عیبی نداره؟
یا مثلا از چه نوعی باشه ، که هم ارزون تر باشه و هم کوچکتر ؟
۳ _ دانشجو کیت کابل فلت کوتاه تر نداره؟
با سلام
از سرو موتور ۱۸۰ درجه استفاده کنید.
از برد آردوینو نانو هم میتوانید استفاده کنید.
همچنین از کابل فلت ۱۰ سانتی متری میتوانید استفاده کنید.
خیلی ممنون
سپاس از همراهی شما
سلام در مورد ساختش میتونیم همکاری کنیم؟و چطوری میتونم باهاتون تماس بگیرم؟ ممنون
با سلام
در این خصوص این مورد امکان پذیر نمیباشد. لوازم مورد نیاز برای ساخت در دانشجوکیت قرار دارد و میتوانید اقدام به خرید کنید.
سلام و خسته نباشید به شما
از نرم افزار اندروید یش استفاده میکنم
وقتی دستور های شما رو کپی کردم ، پایین صفحه ، یه چیزی نوشته ، ظاهرا که اخطار هست
مربوط به خط ۳ هست . نوشته:
‘unknown type name ‘Ultrasonic
ممنون میشم راهنمایی کنین
با سلام
این نرم افزار توسط بنده تست نشده است.
که این طور ، خیلی ممنون
سلام خانم پوربلورچیان ، وقت بخیر ، بابت پروژه مفید تون ، خیلی ممنون و خسته نباشید
فقط یه سوال
اول که برد نانو گرفتیم ، وصل کردیم و خواستیم پروگرام کنیم ، یک چراغش روشن شد و یکی دیگه ، چشمک زن شد ، پرو گرام نکردیم و قطع کردیم
بعد پایه هاش رو لحیم کردیم ، بعد که وصل کردیم برای پرو گرام کردن ، دیگه چراغ هاش روشن نمیشن
مشکل از کجاست؟
اصلا مشکلی هست یا نه؟
با سلام
هر ال ای دی روی برد نمایانگر یک وضعیت است. که بر روی آن نوشته شده است. قبل از رفع عیب بایستی وضعیت هر ال ای دی را طبق دیتاشیت پایه ها بررسی کنید.
لطفا برد را به سیستم متصل و یک برنامه پیش فرض اجرا و نتیجه را اعلام فرمایید.
اول به موبایل وصل کردیم و چراغ پاور ، روشن شد ، چراغ L هم چشمک زن شد
بعد از لحیم کردن پایه ها ، دوباره وصل کردیم به موبایل ولی هیچ چراغی روشن نمیشه
با سلام
منظور شما از موبایل چیست؟ برد آردوینو از طریق سیستم برنامه نویسی و اجرا میشود.
سلام به شما
با اندروید منظورم هست
با نصب نرم افزار برنامه نویسی آردوینو ، از طریق موبایل ، برنامه نویسی میکنیم
این مورد توسط بنده تا به حال تست نشده است.
سلام ممنون از بابت اموزش. من چطور می توانم یک display به این مدار اضافه کنم که تعداد دفعه هایی که پمپ زده میشه رو بشمره و یک LED که با هر پمپ روشن بشه ؟ من به جای Arduino Uno از Arduino Due استفاده کردم و با نحوه اتصال وکد به مشکل برخوردم.
با سلام و تشکر از شما
در این خصوص بایستی دستورات Counter را در کدنویسی وارد کنید. برای اینکار بایستی یک متغیر برای خروجی رله در برنامه تعریف کنید و سپس هر بار که مقدار متغیر افزایش یافت یک واحد به عدد قبلی دریافتی در متغیر اضافه کند و سپس خروجی متغیر را در نمایشگر مورد نظر نمایش دهد.
دقت داشته باشید که چنین موردی نیازمندی کدنویسی کاملتر و پیچیدهتری داشته باشید که عملا از کدهای این آموزش متفاوت است.
سلام وقت بخیر لطفاً شماره تماس بدید یا آنکه با این شمارتماس بگیرید
با سلام
کاربر گرامی تمامی موارد فقط و فقط از همین طریق به صورت ثبت دیدگاه امکان پذیر است.
Arduino: 1.8.15 (Windows 10), Board: “Arduino Uno”
C:\Users\ehsan\Desktop\sketch_sep03b\sketch_sep03b\sketch_sep03b.ino: In function ‘void loop()’:
sketch_sep03b:18:31: error: ‘class Ultrasonic’ has no member named ‘read’
float Distance = ultrasonic.read(CM); // دریافت و تشخیص فاصله
^~~~
sketch_sep03b:18:36: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.read(CM); // دریافت و تشخیص فاصله
^~
exit status 1
‘class Ultrasonic’ has no member named ‘read’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
سلام خسته نباشید این ارور چطوری رفع کنم
با سلام
کتابخانه نصب نشده است و حتما آخرین ورژن را نصب کنید. سپس مجدد آپلود کنید.
سلام خسته نباشید خانوم بلورچیان این ارور رو چجوری حلش کنم؟
Arduino: 1.8.15 (Windows 10), Board: “Arduino Uno”
C:\Users\ehsan\AppData\Local\Temp\arduino_modified_sketch_411263\sketch_sep09a.ino: In function ‘void loop()’:
sketch_sep09a:18:31: error: ‘class Ultrasonic’ has no member named ‘read’
float Distance = ultrasonic.read(CM); // دریافت و تشخیص فاصله
^~~~
sketch_sep09a:18:36: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.read(CM); // دریافت و تشخیص فاصله
^~
exit status 1
‘class Ultrasonic’ has no member named ‘read’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
کتابخانه ی ULTRASONIC را نصب کنید و حتما آخرین ورژن را نصب کنید.
Arduino: 1.8.15 (Windows 10), Board: “Arduino Uno”
C:\Users\ehsan\Downloads\sketch_oct04a\sketch_oct04a.ino: In function ‘void loop()’:
sketch_oct04a:18:31: error: ‘class Ultrasonic’ has no member named ‘read’
float Distance = ultrasonic.read(CM); // دریافت و تشخیص فاصله
^~~~
sketch_oct04a:18:36: error: ‘CM’ was not declared in this scope
float Distance = ultrasonic.read(CM); // دریافت و تشخیص فاصله
^~
exit status 1
‘class Ultrasonic’ has no member named ‘read’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
با سلام
کتابخانه آلتراسونیک را نصب کنید، مشکل حل خواهد شد.
سلام و خسته نباشید خانم بلورچیان
من کل این سنسور و متعلقاتش رو بخوام تهیه کنم شما دارید؟ و اینکه از نزدیک نحوه اتصال رو ببینم.
من برای واحد خودم میخوام بالای کابینتمنبع مایع رو بزارم و با لوله یا شلنگ مایع رو تا دم سینک هدایت کنم و بعد اونجا سنسور رو تعبیه کنم ،سوالم اینجاست ارسال سیگنال و ارتباطات اشکال نمیخورن بدلیل فاصله؟ ممنون از پاسخگویی شما
با سلام
قطعات را از فروشگاه دانشجوکیت تهیه کنید.
Daneshjookit.com
در خصوص روش راه اندازی طول کابل مهم است و حتما از کابل انتقال دیتا نهایتا تا ۱ متر استفاده کنید.
سلام ,حسارتا باید از چه پمپی استفاده بشه؟میشه معرفی کنید؟
با سلام
بستگی به خودتان دارد. میتوانید از پمپ آب ۵ ولتی یا ۱۲ ولتی استفاده کنید و خروجی آن را به رله متصل کنید.